алгебра — Найти матрицу оператора
Здравствуйте. Помогите, пожалуйста, справиться со следующим заданием: Найти матрицу оператора, сопряженного оператору дифференцирования в пространстве многочленов степени не выше 2 в базисе . Скалярное произведение задано выражением: (f|g)=(определенный интеграл от 0 до 1) f(x)g(x)dx Спасибо.
задан 16 Июн ’15 21:46
При желании, можно воспользоваться готовой формулой отсюда. Матрица самого оператора, в также матрица Грама, вычисляются несложно.
(16 Июн ’15 23:49) falcao
@falcao: можете поподробнее расписать применения матрицы Грама к данной задаче?
(19 Июн ’15 3:00) Ivan7776
@Ivan7776: там надо перемножить три матрицы. Способ описан по ссылке. У меня, когда я считал первый раз, была какая-то ошибка во вводе данных, и там получились полуцелые числа. Потом я пересчитал, и ответ совпал с тем, который здесь был указан.
(19 Июн ’15 3:04) falcao
1 ответ
Можно действовать строго по определению. Пусть $$A=\begina_ & a_ & a_\\a_ & a_ & a_\\a_ & a_ & a_\end$$ — матрица сопряженного оператора $%\varphi^*$% в указанном базисе. Это означает, что $%\varphi^\ast(1)=a_+a_(x+1)+a_x^2$%. Эти коэффициенты можно найти из условий $$\int_0^1\varphi(1)\cdot 1dx=\int_0^11\cdot\varphi^\ast(1)dx,$$ $$\int_0^1\varphi(x+1)\cdot 1dx=\int_0^1(x+1)\cdot\varphi^\ast(1)dx,$$ $$\int_0^1\varphi(x^2)\cdot 1dx=\int_0^1x^2\cdot\varphi^\ast(1)dx,$$ которые следуют из определения сопряженного оператора: $%(\varphi(f)|g)=(f|\varphi^\ast(g))$%. Левые части условий легко вычисляются, т.к. известно, что $%\varphi=d/dx$%. Они равны $%0,1,1$% соответственно. В правые части подставляем выражение для $%\varphi^\ast$%, записанное выше и вычисляем интегралы. В результате получится система относительно $%a_,a_,a_$%: $$a_+3/2a_+1/3a_=0,$$ $$3/2a_+7/3a_+7/12a_=1,$$ $$1/3a_+7/12a_+1/5a_=1,$$ решая которую мы находим эти неизвестные. Точно также находим остальные элементы матрицы.
отвечен 16 Июн ’15 23:01
@Ivan7776: решение этой системы даст первый столбец матрицы. Два других столбца могут быть найдены аналогично (при действии $%\varphi^$% на остальные векторы базиса).
(16 Июн ’15 23:46) falcao
@Ivan7776, для нахождения $%a_,a_,a_$% надо записать аналогичную систему с интегралами, где в качестве $%g$% (второй сомножитель в интеграле, вместо $%1$%) будет $%x+1$%. И, соответственно, вместо $%\varphi^\ast(1)$% будет $%\varphi^\ast(x+1)=a_+a_(x+1)+a_x^2$%.
(16 Июн ’15 23:56) cartesius
@Ivan7776: почему одинаковыми? Разве при решении системы так получается? К тому же там не $%a_$%, а $%a_$% (первый столбец).
(16 Июн ’15 23:58) falcao
@Ivan7776: я посчитал с помощью матрицы Грама — у меня не такой ответ получился.
(17 Июн ’15 2:58) falcao
@Ivan7776, в левой части — 0, 3/2 и 5/3. Последнее число — это $$\int_0^1\varphi(x^2)(x+1)dx=\int_0^12x(x+1)dx.$$
(17 Июн ’15 9:26) cartesius
@Ivan7776: у меня там не все числа были целые — я в Maple считал. Целыми были только коэффициенты матрицы, обратной матрице Грама. Они на Ваши числа отчасти похожи. У меня файл с вычислениями сохранён — я потом могу посмотреть. Или Вы посчитайте этим способом — так всё-таки попроще должно быть. Потом можно будет сверить.
(17 Июн ’15 20:20) falcao
@cartesius: у меня получились вот такие коэффициенты: $%a_=192, a_=-168, a_=180. a_=8, a_=-12, a_=30, a_=29, a_=-26, a_=30$%. Но у falcao получились другие. Кто из нас не прав?
(17 Июн ’15 21:54) Ivan7776
@Ivan7776, В первом случае левая часть — это не 0,1,2, а 0,1,1. Но с ответом @falcao все равно не сойдется. Я тоже попробую с помощью матрицы Грама сосчитать — сравню результаты.
(17 Июн ’15 22:56) cartesius
@cartesius: почему $%0, 1, 1$%? Ведь производная от $%x^2 = 2x$%. Подставляя пределы интегрирования, получаем: 2-0=2.
(17 Июн ’15 23:01) Ivan7776
@cartesius: действительно. пересчитал: a11=-18,a12=12,a13=0, a21=8, a22=−12, a23=30, a31=29, a32=−26, a33=30
(17 Июн ’15 23:18) Ivan7776
@Ivan7776, с помощью матрицы Грама ответ тот же.
(17 Июн ’15 23:23) cartesius
@cartesius: спасибо большое за помощь в решении данного задания =)
Линейный оператор
[math] D= \begin 0 & 1 & 0 & 0 & \cdots & 0 \\ 0 & 0 & 2 & 0 & \cdots & 0 \\ 0 & 0 & 0 & 3 &\cdots & 0 \\ \cdots & \cdots & \cdots & \cdots &\cdots & \cdots \\ 0 & 0 & 0 & 0 &\cdots & n \\ \end [/math]
Теорема об эквивалентности задания линейного оператора
Задание Л.О. [math]\mathcal: X \rightarrow Y \Leftrightarrow [/math] заданию его матрицы в паре базисов [math]\_^[/math] и [math]\_^[/math]
[math] \Leftarrow x= \sum\limits_^ \xi^i e_i [/math] (единственным образом)
Производная и оператор дифференцирования
Значение дифференциального и интегрального исчислений сложно переоценить. Фактически современная наука и началась с открытия Ньютоном законов механики и разработки им же соответствующего математического аппарата для анализа следствий этих законов. С тех пор математика была и остается тесно переплетенной с физикой. Иногда для физики используется разработанный математиками аппарат, как в случае с общей теорией относительности Эйнштейна. Иногда физики из своих соображений приходят к новым математическим структурам, например, так было с обобщенными функциями, первую из которых ввел Дирак для нужд квантовой механики.
Производная и интеграл основаны на понятиях о бесконечно малых и возможности деления отрезка до бесконечности. С точки зрения физики существование минимальной длины противоречит теории относительности, ведь разные наблюдатели увидят разную длину. Так же есть веские основания полагать, что деление отрезка до бесконечности тоже невозможно, поскольку понятие длины теряет свой смысл на малых расстояниях (порядка \( \displaystyle 10^\)м.). Несмотря на это вся современная наука (в том числе квантовая механика и теория струн) пропитана дифференциальным исчислением. Даже дискретные результаты типа квантования энергетических уровней атомов получаются из рассмотрения непрерывных функций и дифференциальных уравнений.
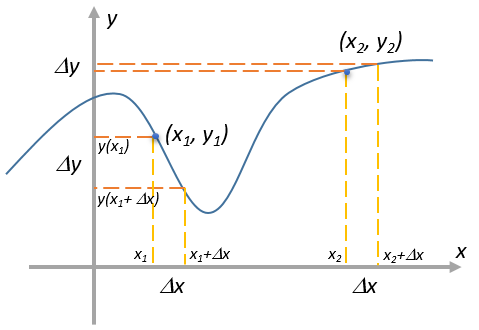
Производная функции в какой-либо точке по определению это отношение интервала \( \displaystyle \Delta y\) к интервалу \( \displaystyle \Delta x\) в окрестности этой точки, когда длины этих интервалов стремятся к нулю. На рисунке для примера показаны две точки с соответствующими интервалами.
Хотя сами интервалы в пределе бесконечно малы, их отношение в общем случае имеет конечную величину:
\( \displaystyle f'(x)=\frac=\frac\) при \( \Delta x\rightarrow 0\)
где через \( \displaystyle dx\) и \( \displaystyle dy\) обозначают дифференциалы (difference — разность), то есть те самые бесконечномалые интервалы — разность декартовых координат текущей и следующей точек.
В научной литературе обозначение производной штрихами практически не используется, а запись в виде отношения дифференциалов общепринята. По сути это и есть определение производной.
Из рисунка видно, что даже при одинаковом \( \displaystyle \Delta x\) соответствующая величина \( \displaystyle \Delta y\) будет разной. Каждой точке непрерывной функции \( \displaystyle f(x)\) можно сопоставить число — производную функции в этой точке. Совокупность этих точек тоже будет непрерывной функцией — производной исходной функции.
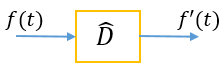
Физическим смыслом производной является скорость изменения исходной функции. Достаточно взглянуть на рисунок выше чтобы понять. В районе первой точки функция быстро меняется. Производная будет иметь большую величину потому что \( \displaystyle \Delta y\) большое. И она будет отрицательной, так как \( \displaystyle y(x_+\Delta x) Производная функции в точке также связана с касательной к этой точке. Если провести через точки \( \displaystyle y(x)\) и \( \displaystyle y(x+\Delta x)\) прямую, то она будет касательной в пределе \( \Delta x\rightarrow 0\). Для элементарных функций их производные можно найти прямо из определения. Так, например, для функции \( \displaystyle y(x)= x^\) производная равна: В реальной жизни, при численных вычислениях на компьютере, к пределу \( \displaystyle \Delta x\rightarrow 0\) вообще не переходят. Скажем, с микрофона поступает аналоговый сигнал \( \displaystyle f(t)\), который необходимо оцифровать с частотой \( \displaystyle 1/\Delta t\) и произвести цифровую обработку в которой как раз и используются производные. Сигнал (функция) разбивается на конечное число точек (дискретизация): Декартовы y-координаты этой дискретной функции можно записать в вектор-столбец: А взятие производной можно записать в виде умножения матриц: Кажется громоздко, но смысл прост. Это просто произведение квадратной матрицы на вектор-столбец (исходная функция), которое дает другой вектор-столбец (производная функция). То есть получившийся вектор-столбец как раз будет являться аппроксимацией производной исходной функции. Проверьте, что умножая приведенную матрицу по стандартному правилу «строка на столбец» мы получим вектор, состоящий из разниц значений функции в соседних точках, например: \( \displaystyle \Delta y_=y_-y_\) и т.п., что по определению и есть производная (если поделить на \( \displaystyle \Delta t\)). Это еще одна наглядная демонстрация откуда пошло название дифференциал (разность по-русски), достаточно посмотреть на вектор-столбец результата. Заметьте, что мы свели операцию взятия производной к простому умножению матриц. Если вектор-столбец является аппроксимацией функции, то приведенная матрица (деленная на \( \displaystyle \Delta t\)) — это аппроксимация самого оператора дифференцирования \( \displaystyle \frac\). То есть при \( \displaystyle \Delta t \rightarrow 0\) матрица и вектор-столбец будут бесконечномерными и мы перейдем от аппроксимации к действительным величинам: функциям и операторам над ними. То есть оператор и матрица фактически одно и тоже в нашем контексте. Кстати, матрицами можно представлять и более простые операции. Одной из точек зрения на процесс взятия производной (дифференцирования) является взгляд с позиции линейных операторов. Оператор (operator — выполняющий операцию) это то, что действует на функцию в результате чего получается другая функция. По прямой аналогии примера с матрицами, алгебраически можно записать: где за \( \displaystyle \hat\) обозначен оператор дифференцирования \( \displaystyle \frac\). Читать следует так: оператор \( \displaystyle \hat\) действует на исходную функцию \( \displaystyle f \) в результате чего получается другая функция \( \displaystyle f’\). Действие оператора можно представить графически как изменение сигнала неким преобразователем: Поскольку другие операторы, в том числе и элементарные (сложение, умножение), можно записать в подобном графическом виде, данная парадигма позволяет наглядно отображать дифференциальные уравнения в виде схем и производить их численный анализ на компьютере. Известный пример реализации — Simulink в составе MATLAB. Файл «Занятие 4. Линейные операторы и их матрицы. Преобразование матрицы линейного оператора при переходе к новому базису» внутри архива находится в папке «Семинары по линейной алгебре». Документ из архива «Семинары по линейной алгебре», который расположен в категории » «. Всё это находится в предмете «линейная алгебра и аналитическая геометрия» из 2 семестр, которые можно найти в файловом архиве МГТУ им. Н.Э.Баумана. Не смотря на прямую связь этого архива с МГТУ им. Н.Э.Баумана, его также можно найти и в других разделах. Архив можно найти в разделе «лекции и семинары», в предмете «линейная алгебра и фнп» в общих файлах. Занятие 4. Линейные операторы и их матрицы. Преобразование матрицы линейного оператора при переходе к новому базису. Действия над линейными операторами. Алгебра линейных операторов. Линейным оператором в линейном пространстве L называется всякое отображение 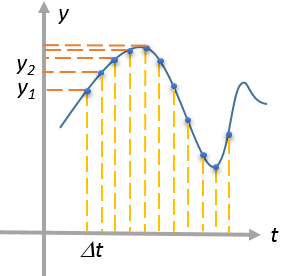
Занятие 4. Линейные операторы и их матрицы. Преобразование матрицы линейного оператора при переходе к новому базису (Семинары по линейной алгебре)
Онлайн просмотр документа «Занятие 4. Линейные операторы и их матрицы. Преобразование матрицы линейного оператора при переходе к новому базису»
Текст из документа «Занятие 4. Линейные операторы и их матрицы. Преобразование матрицы линейного оператора при переходе к новому базису»
 пространства L в себя, обладающее свойствами А(λх) = λАх и А(х + у) = Ах + Ау. Пусть А − линейный оператор в конечномерном пространстве Ln и B = (e1, . , еn) некоторый фиксированный базис. Разложим векторы Аеk, k = 1, . n по базису B: Аеk = а1kе1 + . + аnkеn, k = 1, . п. Тогда матрица A называется матрицей линейного оператора A в базисе B. Пусть А и А’ − матрицы оператора А в базисах B и B’, a
пространства L в себя, обладающее свойствами А(λх) = λАх и А(х + у) = Ах + Ау. Пусть А − линейный оператор в конечномерном пространстве Ln и B = (e1, . , еn) некоторый фиксированный базис. Разложим векторы Аеk, k = 1, . n по базису B: Аеk = а1kе1 + . + аnkеn, k = 1, . п. Тогда матрица A называется матрицей линейного оператора A в базисе B. Пусть А и А’ − матрицы оператора А в базисах B и B’, a  − матрица перехода от базиса B к базису B’. Тогда формула преобразования матрицы оператора при преобразовании базиса имеет вид
− матрица перехода от базиса B к базису B’. Тогда формула преобразования матрицы оператора при преобразовании базиса имеет вид  . Над линейными операторами, действующими в фиксированном пространстве L, вводятся следующие операции: а) сложение операторов: (А + В)х = Ах + Вх; при этом [A + B] = A + B; б) умножение операторов на числа: (λА)х = λ(Ах); при этом [λA] = λA; в) умножение операторов: (AB)x = A(Bx); при этом [AB] = AB. Обратным к оператору A называется оператор А −1 такой, что А А −1 = А −1 A = E, где Е − единичный оператор, реализующий тождественное отображение. Оператор А имеет обратный (и в этом случае называется невырожденным) в том и только том случае, когда его матрица А невырождена (в любом базисе); при этом [А −1 ] = А −1 . Задачи: ОЛ-6, гл. 4: 4.83 – 4.99 (неч.), 4.103, 4.106 (б), 4.107, 4.110, 4.113 В задачах 4.83−4.89 установить, какие из заданных отображений пространства V3 в себя являются линейными операторами; выписать их матрицы в прямоугольном базисе 4.83. Ах = λх, λ − фиксированное число. 4.85. Ах = (x, е)е, где е − заданный единичный вектор. Выяснить геометрический смысл этого отображения. 4.87. Ах = (а, х)х, а − фиксированный вектор. 4.89. Если x = xi + yj + zk, то Ax = (y + z)i + (2x + z)j + (3x − y + z)k. В задачах 4.90−4.95 установить, какие из заданных отображений пространства арифметических векторов R 3 в себя являются линейными операторами; выписать их матрицы в каноническом базисе. 4.91. Ах = (х1, х2 + 1, x3 + 2). 4.93. Ах = (х1 + 2х2 + 2х3, −3х2 + х3, 2х1 + 3х3). 4.95. Ах = (3x1 + 5х3, x1 + x3 + 1, 3х2 − 6х3). В пространстве R 3 заданы два линейных оператора А и В. Найти матрицу [С] линейного оператора С = АВ − ВA и его явный вид в каноническом базисе R 3 : 4.97. Аx = (7x1 + 4x3, 4x2 − 9x3, 3x1 + x2), x = (x2 − 6x3, 3x1 + 7x3, x1 + x2 − x3). 4.99. Аx = (3x1 + x2 − 2x3, 3x1 − 2x2 + 4x3, − 3x1 + 5x2 − x3), Bx = (2x1 + x2, x1 + x2 + 2x3, − x1 + 2x2 + x3). 4.106. В L4 задан линейный оператор А, матрица которого в некотором базисе B = (e1, e2, e3, е4) равна
. Над линейными операторами, действующими в фиксированном пространстве L, вводятся следующие операции: а) сложение операторов: (А + В)х = Ах + Вх; при этом [A + B] = A + B; б) умножение операторов на числа: (λА)х = λ(Ах); при этом [λA] = λA; в) умножение операторов: (AB)x = A(Bx); при этом [AB] = AB. Обратным к оператору A называется оператор А −1 такой, что А А −1 = А −1 A = E, где Е − единичный оператор, реализующий тождественное отображение. Оператор А имеет обратный (и в этом случае называется невырожденным) в том и только том случае, когда его матрица А невырождена (в любом базисе); при этом [А −1 ] = А −1 . Задачи: ОЛ-6, гл. 4: 4.83 – 4.99 (неч.), 4.103, 4.106 (б), 4.107, 4.110, 4.113 В задачах 4.83−4.89 установить, какие из заданных отображений пространства V3 в себя являются линейными операторами; выписать их матрицы в прямоугольном базисе 4.83. Ах = λх, λ − фиксированное число. 4.85. Ах = (x, е)е, где е − заданный единичный вектор. Выяснить геометрический смысл этого отображения. 4.87. Ах = (а, х)х, а − фиксированный вектор. 4.89. Если x = xi + yj + zk, то Ax = (y + z)i + (2x + z)j + (3x − y + z)k. В задачах 4.90−4.95 установить, какие из заданных отображений пространства арифметических векторов R 3 в себя являются линейными операторами; выписать их матрицы в каноническом базисе. 4.91. Ах = (х1, х2 + 1, x3 + 2). 4.93. Ах = (х1 + 2х2 + 2х3, −3х2 + х3, 2х1 + 3х3). 4.95. Ах = (3x1 + 5х3, x1 + x3 + 1, 3х2 − 6х3). В пространстве R 3 заданы два линейных оператора А и В. Найти матрицу [С] линейного оператора С = АВ − ВA и его явный вид в каноническом базисе R 3 : 4.97. Аx = (7x1 + 4x3, 4x2 − 9x3, 3x1 + x2), x = (x2 − 6x3, 3x1 + 7x3, x1 + x2 − x3). 4.99. Аx = (3x1 + x2 − 2x3, 3x1 − 2x2 + 4x3, − 3x1 + 5x2 − x3), Bx = (2x1 + x2, x1 + x2 + 2x3, − x1 + 2x2 + x3). 4.106. В L4 задан линейный оператор А, матрица которого в некотором базисе B = (e1, e2, e3, е4) равна  Найти матрицу этого оператора в базисе B’ = (e1, e1 + e2, e1 + e2+ e3, e1 + e2+ e3 + е4) 4.107. В L3 заданы два базиса: B’:
Найти матрицу этого оператора в базисе B’ = (e1, e1 + e2, e1 + e2+ e3, e1 + e2+ e3 + е4) 4.107. В L3 заданы два базиса: B’:  ,
,  ,
,  , B»:
, B»:  ,
,  ,
,  . Найти матрицу оператора А в базисе B», если его матрица в базисе B’ имеет вид
. Найти матрицу оператора А в базисе B», если его матрица в базисе B’ имеет вид  4.110. В пространстве P3 задан линейный оператор дифференцирования
4.110. В пространстве P3 задан линейный оператор дифференцирования  . Найти матрицу этого оператора в базисе: a) 1, t, . t n − 1 ; 4.113. В пространстве функций, дифференцируемых на всей оси, заданы оператор дифференцирования и оператор A = e λt умножения на функцию e λt . Проверить равенство DA − AD = λA. Домашнее задание: 4.84, 4.86, 4.90 – 4.100 (четн.), 4.108, 4.110(б) 4.84. Ах = λх + а, λ и а фиксированы. 4.86. Aх = [a, х], а − фиксированный вектор. 4.90. Ах = (х2 + х3, 2x1 + x3, 3x1 − х2 + x3). 4.92. Ах = (0, х2 − х3, 0). 4.94. Ах = (3x1 + x2, x1 − 2x2 − x3, 3x2 + 2x3). 4.98. Аx = (2x1 − x2 + 5x3, x1 + 4x2 − x3, 3x1 − 5x2 + 2x3), Bx = (x1 + 4x2 + 3x3, 2x1 + x3, 3x2 − x3). 4.100. Аx = (3x1 + x2 + x3, 2x1 + x2 + 2x3, x1 + 2x2 + 3x3), Bx = (x1 − x2 − x3, 2x1 − x2 + x3, x1 + x2). 4.108. В пространстве L2 оператор А в базисе B’:
. Найти матрицу этого оператора в базисе: a) 1, t, . t n − 1 ; 4.113. В пространстве функций, дифференцируемых на всей оси, заданы оператор дифференцирования и оператор A = e λt умножения на функцию e λt . Проверить равенство DA − AD = λA. Домашнее задание: 4.84, 4.86, 4.90 – 4.100 (четн.), 4.108, 4.110(б) 4.84. Ах = λх + а, λ и а фиксированы. 4.86. Aх = [a, х], а − фиксированный вектор. 4.90. Ах = (х2 + х3, 2x1 + x3, 3x1 − х2 + x3). 4.92. Ах = (0, х2 − х3, 0). 4.94. Ах = (3x1 + x2, x1 − 2x2 − x3, 3x2 + 2x3). 4.98. Аx = (2x1 − x2 + 5x3, x1 + 4x2 − x3, 3x1 − 5x2 + 2x3), Bx = (x1 + 4x2 + 3x3, 2x1 + x3, 3x2 − x3). 4.100. Аx = (3x1 + x2 + x3, 2x1 + x2 + 2x3, x1 + 2x2 + 3x3), Bx = (x1 − x2 − x3, 2x1 − x2 + x3, x1 + x2). 4.108. В пространстве L2 оператор А в базисе B’:  ,
,  , имеет матрицу
, имеет матрицу  . Оператор В в базисе B»:
. Оператор В в базисе B»:  ,
,  , имеет матрицу
, имеет матрицу  . Найти матрицу оператора A + B в базисе B». 4.110. б)
. Найти матрицу оператора A + B в базисе B». 4.110. б)  . Ответы:
. Ответы: 




