Датчики расстояния
Оптические датчики расстояния имеют большой рабочий диапазон (до 130 м) и высокое разрешение (1 мм). Управление осуществляется программным методом или в режиме teach-in. Датчики излучают световой пучок на объект или специальный отражатель и анализируют отраженный свет. Полученные результаты измерений преобразуются в электрический сигнал.
Ультразвуковые датчики расстояния
Почти не существует материалов, которые не могут быть обнаружены УЗ датчиками. Поэтому ультразвуковые измерители – идеальное решение для определения положения и удаленности объекта в трудных условиях эксплуатации с точностью до миллиметра.
Энкодерные датчики расстояния
Энкодеры с тросовым выводом сочетают в себе энкодерное устройство и тросовый механизм и используются для измерения линейных перемещений объектов. Линейное перемещение троса, который закрепляется на измеряемом механизме, пропорционально вращению измерительного барабана в энкодере. Количество оборотов конвертируется в выходной сигнал требуемого типа.
Резистивные датчики расстояния
Датчики преобразовывают линейные механические перемещения в соответствующее изменение сопротивления. Линейный потенциометр может выдавать на выходе значение напряжения, пропорциональное перемещению движка, если на концы резистора подавать напряжение питания, а выходное напряжение снимать с движка.
Магнитные датчики расстояния
Главное достоинство магнитных датчиков расстояния – большое расстояние срабатывания при компактных габаритных размерах датчика. Единственное условие, которое накладывает применение этого типа датчика расстояния, — это оснащение объекта измерений постоянным магнитом. В связи с тем, что магнитное поле проникает сквозь любые объекты и материалы, датчики позволяют определять приближение объекта даже через немагнитные материалы. Другими словами, между объектом с постоянным магнитом и датчиком могут быть расположены любые внешние объекты.
Новинки
Расширена линейка термостатов серии 2455R

Доступен для заказа термостат на 12,8гр С включение/4,4 °С отключение.
Точность поддержания температуры 2,8/4,4 °С соответственно.
Датчики температуры LN222

Фирма Heraeus выпустила на рынок новые датчики серии LN222, оптимизированные для бюджетных применений. Датчики доступны в сопротивлениях 100 и 1000 Ом и классах точности A и B, а диапазон измерений составляет -50…+400°С.
Датчики расстояния Dx35

Датчики расстояния Dx35 – это лучшее сочетание производительности, надежности, точности и цены. Благодаря своей способности точно измерять расстояние до объектов любого цвета и текстуры, их интегрирование в промышленное оборудование позволяет повысить его эффективность и надежность.
Поиск по параметрам
-
Интернет-магазин
- Контакты
- Как купить
- Доставка
- Оплата
- Программа поставок
-
Ресурсы
- Документация
- Применение
- Новости
- Видео
СРАВНИТЕЛЬНЫЙ АНАЛИЗ ДАТЧИКОВ РАССТОЯНИЯ, ИСПОЛЬЗУЕМЫХ В УЧЕБНОЙ РОБОТОТЕХНИКЕ Текст научной статьи по специальности «Электротехника, электронная техника, информационные технологии»
Аннотация научной статьи по электротехнике, электронной технике, информационным технологиям, автор научной работы — Кулебакин Алексей Евгеньевич, Таразанов Андрей Вадимович, Шепелев Станислав Олегович
Робототехника, как показывает практика, — привлекательная прикладная наука для школьников и студентов, которые желают собрать и корректно запустить своего первого робота. Но по ходу конструирования и программирования возникают первые трудности, в результате чего приходится обращаться к простейшим принципиальным знаниям, например: принципу работы транзистора и основным командам в ассемблере. Наша статья о достаточно простом — датчиках расстояния. Мы рассмотрим, какие датчики используются в учебной робототехнике, на основе каких принципов они работают, какие датчики можно найти на текущем рынке, сравним их между собой и сделаем вывод, какой же тип датчиков подходит под цели учебной робототехники больше всего.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по электротехнике, электронной технике, информационным технологиям , автор научной работы — Кулебакин Алексей Евгеньевич, Таразанов Андрей Вадимович, Шепелев Станислав Олегович
Адаптивные оптоэлектронные приборы летательных аппаратов
Сравнительный анализ и подбор систем технического зрения в молочном животноводсве
АНАЛИЗ И КЛАССИФИКАЦИЯ РАСПРЕДЕЛЕННЫХ СЕНСОРНЫХ СИСТЕМ КОЛЛАБОРАТИВНЫХ РОБОТОТЕХНИЧЕСКИХ СРЕДСТВ
Система обнаружения препятствий для мультикоптера
УЛЬТРАЗВУКОВОЙ ДАТЧИК ИЗМЕРЕНИЯ РАССТОЯНИЯ HC-SR04
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
COMPARATIVE ANALYSIS OF DISTANCE SENSORS USED IN EDUCATIONAL ROBOTICS
Robotics, as practice shows, is an attractive applied science for schoolchildren and students who want to assemble and launch their first robot quickly and without any problems, but in reality everything turns out to be much more complicated, and you need to start with something simpler, for example: with studying the principle of operation of a transistor and basic commands in assembler. Our article is about a fairly simple one — distance sensors. We will look at which sensors are used in educational robotics, on the basis of what principles they work, which sensors can be found in the current market, compare them with each other and conclude which type of sensors is most suitable for the purposes of educational robotics.
Текст научной работы на тему «СРАВНИТЕЛЬНЫЙ АНАЛИЗ ДАТЧИКОВ РАССТОЯНИЯ, ИСПОЛЬЗУЕМЫХ В УЧЕБНОЙ РОБОТОТЕХНИКЕ»
Научно-образовательный журнал для студентов и преподавателей «StudNet» №7/2022
Научная статья Original article УДК 378.162.32
СРАВНИТЕЛЬНЫМ АНАЛИЗ ДАТЧИКОВ РАССТОЯНИЯ, ИСПОЛЬЗУЕМЫХ В УЧЕБНОЙ РОБОТОТЕХНИКЕ
COMPARATIVE ANALYSIS OF DISTANCE SENSORS USED IN
Кулебакин Алексей Евгеньевич, студент, ФГАОУ ВО «Национальный исследовательский университет «Московский институт электронной техники» (124498, г. Москва, г. Зеленоград, площадь Шокина, дом 1.), e-mail: kulebakin2001 @mail.ru
Таразанов Андрей Вадимович, студент, ФГАОУ ВО «Национальный исследовательский университет «Московский институт электронной техники» (124498, г. Москва, г. Зеленоград, площадь Шокина, дом 1.), e-mail: tarazanov_andrew@mail .ru
Шепелев Станислав Олегович, старший преподаватель, руководитель СКБ «Робототехника», подразделение — институт нано- и микросистемной техники, ФГАОУ ВО «Национальный исследовательский университет «Московский институт электронной техники» (124498, г. Москва, г. Зеленоград, площадь Шокина, дом 1.), e-mail: sshepelev@ya.ru
Kulebakin Alexey Evgenievich, student, National Research University of Electronic Technology (MIET) (124498, Moscow, Zelenograd, Shokin Square, house 1.), e-mail: kulebakin2001@mail.ru
Tarazanov Andrew Vadimovich, student, National Research University of Electronic Technology (MIET) (124498, Moscow, Zelenograd, Shokin Square, house 1.), e-mail: tarazanov_andrew@mail.ru
Shepelev Stanislav Olegovich, Senior Lecturer, Head of SKB «Robotics», division — Institute of Nano- and Microsystem Technology, National Research University of Electronic Technology (MIET) (124498, Moscow, Zelenograd, Shokin Square, house 1.), e-mail: sshepelev@ya.ru
Аннотация. Робототехника, как показывает практика, — привлекательная прикладная наука для школьников и студентов, которые желают собрать и корректно запустить своего первого робота. Но по ходу конструирования и программирования возникают первые трудности, в результате чего приходится обращаться к простейшим принципиальным знаниям, например: принципу работы транзистора и основным командам в ассемблере. Наша статья о достаточно простом — датчиках расстояния. Мы рассмотрим, какие датчики используются в учебной робототехнике, на основе каких принципов они работают, какие датчики можно найти на текущем рынке, сравним их между собой и сделаем вывод, какой же тип датчиков подходит под цели учебной робототехники больше всего.
Summary. Robotics, as practice shows, is an attractive applied science for schoolchildren and students who want to assemble and launch their first robot quickly and without any problems, but in reality everything turns out to be much more complicated, and you need to start with something simpler, for example: with studying the principle of operation of a transistor and basic commands in assembler. Our article is about a fairly simple one — distance sensors. We will look at which sensors are used in educational robotics, on the basis of what principles they work, which sensors can be found in the current market, compare them with each other and conclude which type of sensors is most suitable for the purposes of educational robotics.
Ключевые слова: Лазерный датчик расстояния, инфракрасный датчик расстояния, ультразвуковой датчик расстояния.
Keywords: Laser distance sensor, IR distance sensor, ultrasonic distance sensor.
Лазерные и инфракрасные датчики различаются типом используемого луча, но при этом у них всего один общий принцип работы -триангуляционный. Принцип триангуляции основан на измерении угла между лазерным лучом, попадающим на объект, и объективом дальномера. Зная расстояние лазер-объектив ф) и измеренный угол, можно вычислить расстояние до объекта — чем меньше угол, тем больше расстояние.
Рис. 1 — Принцип триангуляции Теперь рассмотрим два принципа, характерные только для лазерных датчиков:
— Принцип Time-of-Flight (ToF) или измерения времени пролёта луча: лазерный диод датчика излучает импульсы, которые отражаются от цели и затем улавливаются фотоприемником того же датчика. Измерив время между моментом излучения импульса и моментом его «возврата», происходит вычисление расстояние до объекта. Данный метод наиболее часто применяется на датчиках дальнего действия, так при больших дистанциях измерения расстояния влияние погрешности измерения таймера уменьшается.
Рис. 2 — Принцип измерения времени пролета Принцип разности фаз. В этом методе, в отличие от предыдущего, лазер работает постоянно, но его излучение амплитудно модулируется сигналом определенной частоты (обычно это частоты меньше 500 МГц). Длина волны лазера при этом остается неизменной (она находится в пределах 500 — 1100 нм). Отраженное от объекта излучение принимается фотоприемником, и его фаза сравнивается с фазой опорного сигнала — от лазера. Наличие задержки при распространении волны создает сдвиг фаз, который и измеряется дальномером.
Рис. 3 — Принцип разности фаз Из принципов работы датчиков формируются особенности их работы: что лазерный, что инфракрасный лучи являются световой волной, а это значит, что датчики, построенные на их основе, плохо взаимодействуют с объектами, которые либо пропускают свет сквозь себя, либо поглощают его.
Следовательно, для них будет невидимо стекло, а объекты темных цветов будут обнаруживаться с меньшей дистанции (чем темнее цвет, тем выше поглощение света). Однако из-за разной природы света между инфракрасными и лазерными датчиками будет существовать и значительная разница. Инфракрасное излучения широко распространено в природе, из-за чего датчик такого типа будет «ловить» помехи особенно при попадании на него прямого солнечного света. Лазер, в свою очередь, может создавать поток когерентного монохроматического узконаправленного излучения, что сильно уменьшает вероятность помех, т.к. в природе лазерное излучение не встречается, и источником помех может выступать только другой лазер. За такое преимущество мы в буквальном смысле вынуждены расплачиваться -лазерный источник излучения дороже, чем инфракрасный.
Переходя непосредственно к рассмотрению конкретных моделей лазерных датчиков, следует сделать оговорку, что мы будем рассматривать только ToF датчики, т.к. применение именно этого типа наиболее рационально в учебной робототехнике из-за приемлемой стоимости, небольших габаритов и получения качественных результатов.
Наиболее удачными лазерными датчиками расстояния на мировом рынке по соотношению цена-качество может похвастаться швейцарская компания STMicroelectronics. Исходя из условий, что датчики расстояния мы будем использовать на учебном роботе в небольшом закрытом помещении, делаем вывод, что нам интересны варианты с небольшой ценой, габаритами и рабочей дистанцией. Рассмотрим актуальные на данный момент модели датчиков, которые может предложить компания:
Таблица 1 — Сравнительная таблица лазерных датчиков компании ST
Наименование VL53L0X VL6180V1 VL53L1X VL53L3CX
Расстояние до объекта, м До 2 До 0,62 До 4 До 3,1
Обнаружение нескольких объектов — До 4 объектов
Угол обзора (РоУ), ° 25 61 15. 27, линзы на SPAD
Компенсации помех Компенсация перекрестных оптических помех Компенсация перекрестных оптических помех и фильтрация смазывания стекла
Цены, руб 600 1300 3300 2600
Исходя из данных таблицы, делаем заключение, что наиболее удачным вариантом в нашем случае будет датчик VL53L0X, поскольку при цене примерно в 600 рублей он обеспечивает обнаружение препятствий на расстоянии до двух метров и компенсацию перекрестных оптических помех. Он проигрывает по таким параметрам, как угол обзора и обнаружение нескольких объектов, не столь критичным для нас, но имеет невысокую стоимость, что несомненно является плюсом.
Теперь рассмотрим наиболее популярные ИК дальномеры. Подходящие под наши задачи датчики производит компания Sharp, но большого разнообразия мы здесь не имеем — на рынке всего два решения компании, которые отличаются между собой по сути лишь дистанцией, на которой они работают:
1. Инфракрасный дальномер GP2Y0A02YK0F (20-150 см). Цена 470р.
2. Инфракрасный дальномер GP2Y0A21YK0F (10-80 см). Цена 430р.
Исходя из того, что более бюджетный датчик обладает вдвое меньшей слепой зоной, большую часть которой можно скомпенсировать размещением датчика в центре робота, мы выберем GP2Y0A21YK0F, к тому же в наших
условия нецелесообразно переплачивать за увеличение дальности обнаружения объектов.
Рис. 4 — Лазерный датчик VL53L0X Рис. 5 — ИК датчик
Ультразвуковые датчики расстояния. Принцип работы датчика заключен в излучении высокочастотных звуковых импульсов с заданной периодичностью, которые распространяются в воздухе со скоростью звука. При встрече с объектом звуковая волна отражается от него и возвращается обратно к датчику в виде эха. Датчик воспринимает этот сигнал и рассчитывает расстояние до объекта, основываясь на временном промежутке между моментом излучения сигнала и получением отраженного эха сигнала.
1. Излучение звукового импульса 2. Отражение
Рис. 6 — Принцип работы ультразвукового датчика Особенностью датчиков, работающих на звуковой волне, является то, что в отличии от света, чья скорость постоянна при любых условиях, на скорость звука влияет множество параметров внешней среды (температура, давление, наличие ветра), что в конечном счете сказывается как на точности, так и на максимальной дальности измерения.
Стоит отметить, что сила рассеяния звука в пространстве значительно выше, чем у световой волны, а этот факт накладывает ограничение на максимальную дальность измерений (у решений представленных на рынке максимальная дальность 10 метров, но в среднем 0,4 — 5 м).
Наилучшим ультразвуковым датчиком на рынке на текущий момент является HC-SR04 или его улучшенная и чуть более дорогая версия НУ-SRF05, так как они дают приемлемую дальность работы (4 метра) при низкой цене в 200-300 рублей.
Для наглядности сведём преимущества и недостатки всех рассмотренные видов датчиков в таблицу 2. Таблица 2 — Преимущества и недостатки датчиков расстояния
Тип датчика Преимущества Недостатки
Лазерный + лучшая точность по — по сравнению с ИК и УЗ
сравнению с датчиками наиболее
ультразвуковыми дорогой вид датчиков;
датчиками; — ошибочные вычисления
+ устойчивость к при попадании лазера
помехам на отражающую или
+ большая дальность прозрачную
измерения (до поверхность
по сравнению с УЗ
Инфракрасны + лучше точность по — ошибочные вычисления
й сравнению с при попадании луча на
быстродействие по помехам;
Инфракрасны + самое маленькое — небольшая дальность
й энергопотребление; измерения по
+ дешевле по сравнению сравнению с другими
с лазерными видами датчиков;
+ зеркальные дальность измерения
поверхности могут зависит от способности
усиливать сигнал. поглощать свет
объекта, до которого
— дороже по сравнению с
Ультразвуков + хорошо работают с — небольшая дальность
ой прозрачными или измерений (в среднем
зеркальными до 5 метров);
объектами, а также — зависимость от
жидкостями; погодных условий;
+ по сравнению с — некорректное
лазерными и ИК распознавание
представляют собой покрытий;
наиболее дешевый вид
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
никак не зависят от
Выводы. Какой-то один выбранный нами датчик будет применяться на учебном трехколесном роботе, который должен выполнять задачи в условиях небольшого закрытого помещения. Следовательно, акцент при выборе датчика необходимо сделать на низкую стоимость, небольшую рабочую дистанцию и наименьшую подверженность помехам. Исходя из вышепредставленного анализа каждого типа датчиков, наилучшим из них по данным критериям можно считать ультразвуковой, поскольку данные, получаемые от окружающей среды, в помещении изменяются незначительно: нет перепадов температур и высот, и уж тем более нет ветра; что избавляет нас от проблем ультразвукового датчика, и кроме того в комнате имеется много хорошо отражающих и прозрачных поверхностей, а также разноцветных предметов, включая матово-черные, с которыми инфракрасные и лазерные датчики работают плохо. Помимо прочего, невысокая стоимость делает ультразвуковой HY-SRF05 явным фаворитом в нашем сравнении, т.к. при
финансовом преимуществе он не проигрывает в технических характеристиках
лазерным и инфракрасным датчикам.
1. Дж. Фрайден. Современные датчики. Справочник — Москва: Техносфера, 2005. — 592 с.
2. «КИП — сервис»: [Электронный ресурс]. URL: https://kipservis.ru/microsonic/obshie_svedenia.htm
3. Лазерные приборы и методы измерения дальности : учеб. пособие по курсам «Проектирование лазерных оптико-электронных преобразователей» и «Оптико-электронные приборы» / Бокшанский В. Б., Бондаренко Д. А., Вязовых М. В. [и др.] ; ред. Карасик В. Е. ; МГТУ им. Н. Э. Баумана. — М. : Изд-во МГТУ им. Н. Э. Баумана, 2012. — 92 с.
4. T. Danko. «Webcam Based DIY Laser Rangefinder», 2009 [Электронный ресурс]. URL: https://sites.google.com/site/todddanko/home/webcam_laser_ranger
5. «Лазерные датчики ST: измерение расстояния до объекта стало более надежным и быстрым»: [Электронный ресурс]. URL: https: //www.compel .ru/lib/142189
1. J. Frieden. Modern sensors. Directory — Moscow: Technosphere, 2005. — 592 p.
2. «KIP — service»: [Electronic resource]. URL: https://kipservis.ru/microsonic/obshie_svedenia.htm
3. Laser devices and methods of measuring range : studies. manual on the courses «Design of laser optoelectronic converters» and «Optoelectronic devices» / Bokshansky V. B., Bondarenko D. A., Vyazov M. V. [et al.] ; ed . Karasik V. E. ; Bauman Moscow State Technical University. — M. : Publishing House of Bauman Moscow State Technical University, 2012. — 92 p.
4. T. Danko. «Webcam Based DIY Laser Rangefinder», 2009 [Electronic resource]. URL: https://sites.google.com/site/todddanko/home/webcam_laser_ranger
5. «ST laser sensors: measuring the distance to an object has become more reliable and faster»: [Electronic resource]. URL: https://www.compel.ru/lib/142189
© Кулебакин А.Е., Таразанов А.В., Шепелев С.О. 2022 Научно-образовательный журнал для студентов и преподавателей «StudNet» №7/2022.
Для цитирования: Кулебакин А.Е., Таразанов А.В, Шепелев С.О. СРАВНИТЕЛЬНЫЙ АНАЛИЗ ДАТЧИКОВ РАССТОЯНИЯ, ИСПОЛЬЗУЕМЫХ В УЧЕБНОЙ РОБОТОТЕХНИКЕ// Научно-образовательный журнал для студентов и преподавателей «StudNet» №7/2022.
Датчик дальности ультразвуковой HC-SR04 2-400см

Ультразвуковой датчик дальности HC-SR04 идеально подходит для разных приложений, которым требуется выполнение измерений между движущимися или стационарными объектами. Естественно он очень популярен для робототехники, но также этот продукт может быть полезным в системах безопасности или если так пожелаете в качестве замены инфракрасного. Датчик расстояния с помощью гидролокатора; Ультразвуковой (значительно выше человеческого слуха) импульс передается от устройства и расстояние до цели определяется путем измерения времени, необходимого для возвращения эха.
В отличие от инфракрасного дальномера, на показания ультразвукового дальномера не влияет засветка от солнца или цвет объекта. Однако он не лишен недостатков. С помощью ультразвукового дальномера практически невозможно определить расстояние до очень тонких или пушистых объектов.
Подключение дальномера осуществляется с помощью стандартных проводов. Для начала измерения необходимо подать на цифровой вход логическую единицу на 10мкс. После завершения измерения, на выход будет подана логическая единица на время, пропорциональное расстоянию до объекта.
Распиновка выводов следующая: VCC — питание TRIG — цифровой вход ECHO — цифровой выход GND — земля

Характеристики
| Артикул | 04010406 |
Датчики расстояния: Серия LS

Компания OPTEX FA Co., Ltd (Япония) образовалась в 2002г. из подразделения промышленной автоматизации японской компании OPTEX, и располагает сегодня широкой линейкой датчиков и систем для автоматизаци.

- 2D лазерный датчик смещения
- Революция в управлении профилями
- Линейность +/-0,1% F.S.
- Период выборки = 0,5 мс (макс. скорость)

Теперь можно выполнять профильные измерения в широком диапазоне производственных линий для обеспечения контроля качества деталей и материалов. За счет великолепной высокоскоростной производительности и соотношения цены и качества, датчики серии FASTUS LS можно использовать в высокоточных приложениях двумерных измерений, что невозможно при применении лазерных датчиков смещения с точечным лучом. Датчик серии LS — это датчик измерения профиля нового поколения, открывающий новые возможности в сфере измерения компонентов.
Воспроизводимость:
2 мкм / Высота (ось Z)
Разрешение:
25 мкм / Ширина (ось X)
Линейность:
+/-0,1% F.S.
Период снятия измерений:
Макс. скорость = 0,5 мс
Общий период снятия измерений = 5 мс
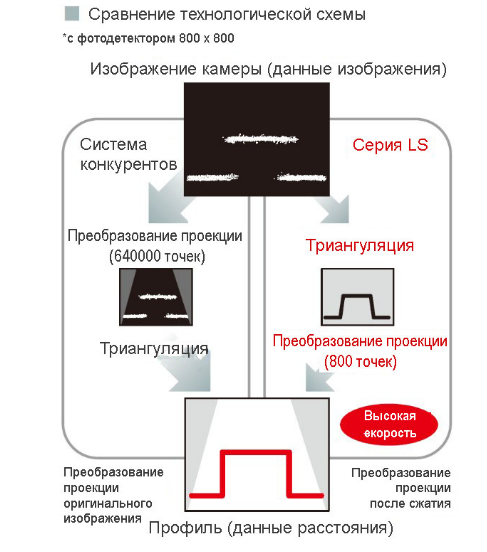
Специализированная система обеспечивает высокую скорость, имеет компактный размер и малую стоимость
За счет использования математической операции, известной как проекционное преобразование (снятого изображения в расстояние), можно измерять высоту и ширину с высокой степенью точности. Кроме того, использование специализированного метода проекционного преобразования после триангуляции – в отличие от систем конкурентов, в которых преобразование выполняется по каждому пикселю, – позволяет значительно уменьшить пропускаемый поток данных и обеспечить высокоскоростное измерение. Модуль обработки сохранил малые размеры для создания компактного недорогого продукта.
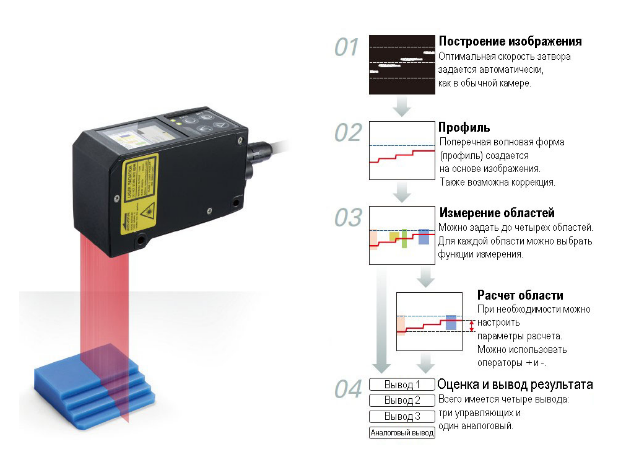
Простота настройки
Датчик серии LS можно настроить за четыре простых шага: формирование изображения, профиль, измерение области и расчет, оценка результата и вывод.
Функции стабильного высокоточного измерения
Автоматическая функция
Просто установите рабочую деталь и нажмите на кнопку “Auto Adjust” (Автоматическая регулировка) для автоматической настройки оптимальной скорости затвора в соответствии с количеством света от детали.
Функция коррекции профиля
Датчики серии LS имеют функцию коррекции профиля, с помощью которой можно регулировать смещение положения детали по отношению к записанному эталонному изображению по высоте, положению и наклону. Коррекция профиля эффективна для производственных линий, на которых детали не остаются неподвижными.
| Четыре режима камеры В датчиках серии LS имеются четыре режима камеры для стабильной регистрации изображений: стандартный режим высокого разрешения; высокоскоростной режим, в котором изображение захватывается в четыре раза быстрее, чем при стандартной скорости; режим расширенного динамического диапазона (HDR), в котором увеличивается диапазон яркости; и режим снижения уровня шума (NR). |
 |
Режим HDR (режим расширенного динамического диапазона)
В режиме HDR формируется составное изображение из двух изображений с разной скоростью работы затвора. Эта функция полезна для деталей с высококонтрастными участками, например, зеркальными металлическими поверхностями.
Режим NR mode (снижения уровня шума)
В режиме NR формируется составное изображение за счет усиления контрастности изображения ярких участков и их комбинирования с изображениями темных участков. С помощью этой функции можно уменьшить уровень шума (например, естественного освещения).
Простое в настройке программное обеспечение, LS Navigator (в комплекте)
В комплекте с датчиками серии LS поставляется программное обеспечение, позволяющее легко настроить их с компьютера.
— Простая конфигурация маски и участков измерений
— Все настройки конфигурируются через протокол RS-485
— Профили также можно выводить с высокой точностью
— Нет необходимости в наличии дорогостоящих специальных дисплеев
* Требуется отдельный кабель для соединения с ПК (дополнительно)
* Возможность изменения внешнего вида и компоновки окна.

Измерение высоты компонентов тормозных колодок
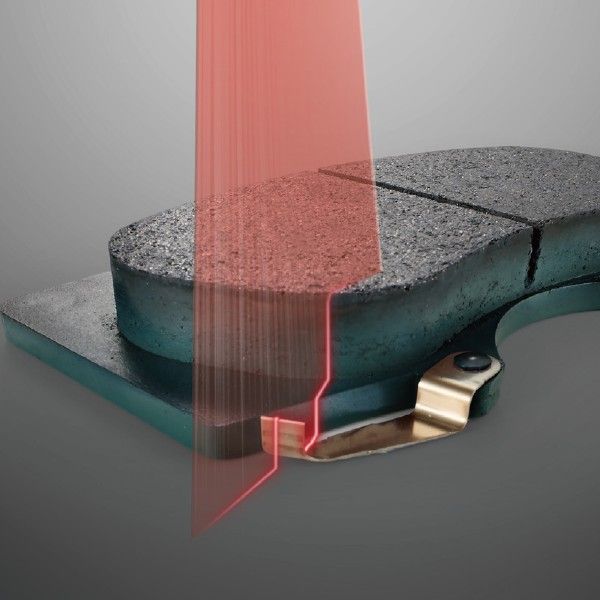
Измерение положения (высоты) края индикатора износа колодки (PWI), металлической детали, которая указывает на износ тормоза, по отношению к поверхности тормоза.
Детектирование двойной подачи плат
По сравнению с предыдущими системами, в которых датчик смещения устанавливался над и под платами для измерения толщины, один датчик серии LS может проводить измерения сбоку, что обеспечивает простоту установки и проектирования линии.
Проверка положения нанесения/количества герметика

При измерении ширины и высоты герметика после нанесения можно немедленно получить данные о правильности его количества и положения.
Проверка разницы уровня/зазора между автомобильными дверьми

Быстрые бесконтактные измерения разницы зазора и уровня между дверьми и шасси автомобиля для проверки точности их установки.
| Модель | LS-100CN | |
|---|---|---|
| Диапазон измерений | 100+/-25 мм | |
| Ширина поля обзора (на рабочем расстоянии) | 17 мм (при 75 мм) – 27 мм (при 125 мм) | |
| Источник освещения | Красный лазер, 655 нм, макс. 1 мВт | |
| Класс лазера | IEC/JIS: класс 2, FDA: класс II | |
| Размер точки (*1) | 0,3 x 32 мм | |
| Линейность (ось Z) | +/-50 мкм (±0,1%F.S.) | |
| Воспроизводимость (ось Z) (*2) | 2 мкм | |
| Разрешение (ось X) (*3) | 25 мкм | |
| Период снятия измерений | Стандартное значение: 5 мс (при измерении во всем поле обзора в режиме «Hi-res»), макс. скорость: 0,5 мс | |
| Дисплей | Точечно-матричный дисплей | |
| Индикаторы | Индикатор питания (зеленый), индикатор лазерного излучения (зеленый) | |
| Внешний ввод | Выбирается из банка, триггер, сохранение, сброс, прекращение и смещение лазерного излучения | |
| Управляющий вывод | 3 NPN выхода с открытым коллектором, макс. 100 мА/30 В пост. тока (макс. остаточное напряжение: 1,8 В) | |
| Аналоговый вывод | От 4 до 20 мА, вне диапазона измерений: 24 мА (макс. импеданс нагрузки: 300 Ом) | |
| Коммуникационный интерфейс | RS-485 полудуплексный (от 9,6 кбит/с до 4,0 Мбит/с) | |
| Температурный дрейф (типовое значение) | +/-0,05%F.S. на градус Цельсия | |
| Питание | 12 . 24 В пост. тока (+10%, -5%, включая пульсацию) | |
| Потребляемый ток (*4) | Макс. 180 мА | |
| Степень защиты | IP67 | |
| Рабочая температура / влажность | От -10 до 40 / от 35 до 85% RH (без конденсации или замерзания) | |
| Температура / влажность хранения | От -20 до 60 / от 35 до 85% RH (без конденсации или замерзания) | |
| Рабочая освещенность | Солнечный свет: макс. 10000 лк, высокочастотная лампа: макс. 3000 лк (лампа накаливания) | |
| Устойчивость к вибрации | От 10 до 55 Гц; двойная амплитуда 1,5 мм; 2 часа в каждом из направлений по X, Y и Z | |
| Устойчивость к ударам | Прибл. 50G (500 м/с2), 3 раза в каждом из направлений по X, Y и Z | |
| Материал | Корпус: оцинкованный, литой и PC, крышки лазерного эмиттера и приемника: стекло | |
| Вес | Прибл. 300 г | |
Модель вывода PNP — LS-100CP
*1 Определено по усилию 1/e2 (13,5%) в центре. На датчик может влиять присутствие освещения, отличного от освещения в рамках размера пятна, и наличие сильно отражающего объекта вблизи зоны детектирования.
*2 Среднее измерение высоты белой детали с центральной шириной 5 мм, сглаживание осуществляется 8 раз, скользящее среднее — 32 раза (с настройками по умолчанию).
*3 С расстоянием измерения 75 мм.
*4 Напряжение источника питания: 24 В пост. тока, не включая тока нагрузки управляющего вывода и включая аналоговый вывод.