1. Координаты точки и вектора
Три попарно перпендикулярные прямые с выбранными направлениями и единицей измерения образуют систему координат в пространстве. Точка пересечения всех прямых является началом системы координат.

Оси координат \(Ox\), \(Oy\) и \(Oz\) называются соответственно: \(Ox\) — ось абсцисс , \(Oy\) — ось ординат , \(Oz\) — ось аппликат .
Через две пересекающиеся прямые можно провести плоскость. Получаем три координатные плоскости: \((Oxy)\), \((Oyz)\) и \((Oxz)\).

Положение точки \(A\) в пространстве определяется тремя координатами: \(x\), \(y\) и \(z\).

Координата \(x\) называется абсциссой точки \(A\), координата \(y\) — ординатой точки \(A\), координата \(z\) — аппликатой точки \(A\).
Записываются так: \(A(x; y; z)\).
Если точка находится на оси \(Ox\), то её координаты \(X(x; 0; 0)\).
Если точка находится на оси \(Oy\), то её координаты \(Y(0; y; 0)\).
Если точка находится на оси \(Oz\), то её координаты \(Z(0; 0; z)\).
Если точка находится в плоскости \(Oxy\), то её координаты A 1 x ; y ; 0 .
Если точка находится в плоскости \(Oyz\), то её координаты A 2 0 ; y ; z .
Если точка находится в плоскости \(Oxz\), то её координаты A 3 x ; 0 ; z .
Координаты вектора

Если в системе координат от начальной точки отложить единичные векторы i → , j → и k → , то можно определить прямоугольный базис. Любой вектор можно разложить по единичным векторам и представить в виде OA → = x ⋅ i → + y ⋅ j → + z ⋅ k → .
Коэффициенты \(x\), \(y\) и \(z\) определяются одним-единственным образом и называются координатами вектора.
Записываются так: OA → x ; y ; z .
Рассмотрим правила о том, как с помощью координат записать:
— координаты суммы векторов, если даны координаты векторов:
a → x 1 ; y 1 ; z 1 , b → x 2 ; y 2 ; z 2 , a → + b → x 1 + x 2 ; y 1 + y 2 ; z 1 + z 2 ;
— координаты разности векторов, если даны координаты векторов:
a → − b → x 1 − x 2 ; y 1 − y 2 ; z 1 − z 2 ;
КООРДИНАТНЫЙ МЕТОД КАК ОДИН ИЗ РАЦИОНАЛЬНЫХ СПОСОБОВ РЕШЕНИЯ СТЕРЕОМЕТРИЧЕСКИХ ЗАДАЧ Текст научной статьи по специальности «Математика»
МЕТОД КООРДИНАТ / РАССТОЯНИЕ ОТ ТОЧКИ ДО ПЛОСКОСТИ / УГОЛ МЕЖДУ ПРЯМОЙ И ПЛОСКОСТЬЮ / ЕГЭ / СТЕРЕОМЕТРИЧЕСКИЕ ЗАДАЧИ / METHOD OF COORDINATES / DISTANCE FROM POINT TO PLANE / ANGLE BETWEEN LINE AND PLANE / USE / STEREOMETRIC PROBLEMS
Аннотация научной статьи по математике, автор научной работы — Сапарова Д.Х., Минкин А.В.
В статье показано, что использование метода координат в решении стереометрических задач может быть рационален. Приведены некоторые определения и формулы из школьного курса геометрии, используемые для решения задач. Автор статьи показал сущность приведенного способа на примерах решения задач, взятых из ЕГЭ по математике профильного уровня.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по математике , автор научной работы — Сапарова Д.Х., Минкин А.В.
Формирование приемов решения стереометрических задач как средство повышения качества математической подготовки
ПРАКТИЧЕСКИЕ АСПЕКТЫ РЕШЕНИЯ СТЕРЕОМЕТРИЧЕСКИХ ЗАДАЧ С ПОМОЩЬЮ ВЕКТОРНО-КООРДИНАТНОГО МЕТОДА
ЭТАПЫ РЕШЕНИЯ СТЕРЕОМЕТРИЧЕСКИХ ЗАДАЧ КАК ОСНОВА МЕТОДИКИ ОБУЧЕНИЯ ШКОЛЬНИКОВ ИХ РЕШЕНИЮ
УРОК ОДНОЙ ЗАДАЧИ КАК СПОСОБ ПОВТОРЕНИЯ МЕТОДОВ НАХОЖДЕНИЯ УГЛА МЕЖДУ ПЛОСКОСТЯМИ
Аналогия как один из способов поисковой деятельности при доказательстве стереометрических задач
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
THE COORDINATE METHOD AS ONE OF THE RATIONAL WAYS OF SOLVING STEREOMETRIC TASKS
The article shows that the use of the method of coordinates in solving stereometric problems can be rational. Some definitions and formulas from the school course of geometry used to solve problems are given. The author of the article showed the essence of the given method on the examples of solving problems taken from the exam in mathematics of the profile level.
Текст научной работы на тему «КООРДИНАТНЫЙ МЕТОД КАК ОДИН ИЗ РАЦИОНАЛЬНЫХ СПОСОБОВ РЕШЕНИЯ СТЕРЕОМЕТРИЧЕСКИХ ЗАДАЧ»
Сапарова Д.Х. студент 4 курса Минкин А.В., к ф.-м. н.
кафедра «Математики и прикладной информатики»
Россия, г. Елабуга
КООРДИНАТНЫЙ МЕТОД КАК ОДИН ИЗ РАЦИОНАЛЬНЫХ СПОСОБОВ РЕШЕНИЯ СТЕРЕОМЕТРИЧЕСКИХ ЗАДАЧ
Аннотация. В статье показано, что использование метода координат в решении стереометрических задач может быть рационален. Приведены некоторые определения и формулы из школьного курса геометрии, используемые для решения задач. Автор статьи показал сущность приведенного способа на примерах решения задач, взятых из ЕГЭ по математике профильного уровня.
Ключевые слова: метод координат, расстояние от точки до плоскости, угол между прямой и плоскостью, ЕГЭ, стереометрические задачи.
Saparova D.H. 4th year student Elabuga Institute, Kazan Federal University
Minkin A. V., candidate of physical and mathematical sciences
associate Professor of «Mathematics and applied Informatics» Elabuga Institute, Kazan Federal University THE COORDINATE METHOD AS ONE OF THE RATIONAL WAYS OF SOLVING STEREOMETRIC TASKS
Annotation. The article shows that the use of the method of coordinates in solving stereometric problems can be rational. Some definitions andformulas from the school course of geometry used to solve problems are given. The author of the article showed the essence of the given method on the examples of solving problems taken from the exam in mathematics of the profile level.
Keywords: method of coordinates, distance from point to plane, angle between line and plane, use, stereometric problems.
Метод координат или координатный метод является одним из алгебраических способов решения задач. Достоинство этого метода заключается в том, что при решении применяется несколько формул и стандартный алгоритм. Имеется и недостаток. Формулы с трудом даются запоминанию, и в них легко допустить ошибку. Также необходимо подобрать
такую систему координат, чтобы вычисления были не затруднительными. В дальнейшей работе подробно рассмотрим весь алгоритм решения и ситуации выбора системы координат.
Для начала дадим некоторые определения. Расстояние от точки до плоскости, не содержащей эту точку, есть длина отрезка перпендикулярно опущенного из этой точки на данную плоскость [1].
Чтобы найти расстояние при помощи нашего метода, используем
формулу р(М, (ABC)) = где точка М(х0;у0; z0) не лежит на
плоскости а: Ах + Ву + Cz + D = 0, за буквы А, В, С, D обозначим коэффициенты уравнения плоскости.
Угол между прямой и плоскостью — это угол между этой прямой и её проекцией на эту плоскость, где прямая не перпендикулярна плоскости [1, с. 43].
При использовании приведенного метода нет необходимости построения проекций, а важно лишь положение точек, принадлежащие данной прямой и плоскости.
Угол между прямой и плоскостью обозначим а = ))= , где
другая прямая b принадлежит плоскости ABC. Из уравнения плоскости найдем вектор нормали п, координатами которого являются коэффициенты: п = . Поэтому, чтобы найти угол между прямой и плоскостью, будем
искать угол между прямой и этой нормалью, зная определение скалярного
произведения векторов: Iа 1 ■ Iп 1. Поэтому Д = arceos ^ будет нашим
Теперь рассмотрим использование приведенного метода на примере решения стереометрических задач под 14 номером из ЕГЭ по математике профильного уровня.
Задача 1. Пусть дана пирамида SABCD, в основании которого лежит прямоугольник ABCD со сторонами АВ = 4 и ВС = 3. Длины боковых рёбер равны AS = JTi,SB = 3^3, SD = 2^5.
1) Доказать, что ребро AS является высотой пирамиды.
2) Найти угол между прямой SC и плоскостью ASB.
Выполним доказательство. Если в задаче необходимо доказать, что одна из боковых ребер пирамиды является высотой, то наш рисунок примет вид -рис. 1.
Чтобы доказать, что Л5 есть высота пирамиды, необходимо убедится в том, что j4S 1 (ЛБС). Следуя нашим рассуждениям, нам необходимо доказать, что ¿(AS, (ЛБС)) = 90°. Знаем, что п 1 (ЛБС), то он получается
n II AS . Поэтому докажем, что ¿(AS, n ) = 0, или косинус этого угла равен 1.
Расположим систему координат так, как показано на рис 2. Точка А находится в начале координат. Ось Oz будет содержать высоту пирамиды, в нашем случае AS.
Рис.2. Проекция пирамиды на плоскость хОу. Выбрали такое положение, т.к. это облегчит дальнейшие вычисления
координат необходимых точек. Поэтому получаем AS = . Т.к. мы указали, что основание ЛБС лежит в плоскости хОу, то уравнение плоскости примет вид: z = 0 и п = . Теперь убедимся в нашем предположении:
/77″? sXn 0-0+0-0+VTl-l
Чтобы узнать угол между прямой 5С и плоскостью AS5, найдем вектор нормали п плоскости AS5.
Т.к. точки Л(0; 0; 0); 5(0; 4; 0);S(0; 0; VTl) е yOz, то запишем уравнение плоскости в виде х = 0 и п = .
Зная, что С(3; 4; 0), получаем SC = По нашим рассуждениям находим косинус угла
3 ■ 1 + 4 ■ 0 + (-VTT) ■ 0
Vl2 + 0 + 0 ■ ^32 + 42 + (-VTT)
Задача 2. Пусть дана правильная треугольная пирамида БАВС, где 5 вершина и все рёбра равны 4. Точка N является серединой ребра АС, а точка Р делит высоту пирамиды в отношении 3:1, считая от точки Б.
1) Доказать, что прямая ЫР перпендикулярна прямой ВБ.
2) Найти расстояние от точки В до плоскости, содержащую прямую ЫР. Для начала построим чертеж и за точку О обозначим центр основания,
Рис. 3. Треугольная пирамида
Докажем, что прямые NP 1 BS. Покажем, что их направляющие векторы перпендикулярны. Т.е. скалярное произведение данных векторов должно быть равным нулю.
Расположим систему координат так, что основание пирамиды ABC лежит на плоскости хОу, ось Oz II SO. Точку А поместим в начало координат. Получим координаты Л(0; 0; 0), С(0; 4; 0); N(0; 2; 0). Далее, зная, что высота равностороннего треугольника определяется по
формуле: h = в нашем случае получаем: h = BN = = 2V3. Из этого
следует, что B(2V3;2;0). Найдем центр основания пирамиды как точку пересечения биссектрис, а в нашем случае и медиан. Медианы точкой пересечения делятся как 2:1, считая от вершины. Поэтому можем записать
Рис. 4. Проекция треугольной пирамиды на плоскость хОу. Точки 5 и Р при проецировании на плоскость хОу переходят в О, поэтому координаты по абцисс и ординат у них будут схожи. Найдем высоту
пирамиды в прямоугольном Д50Б по известной теореме Пифагора 50 = Т^В^-М? = ^¡^-(рй)5 = = /16-16 = 1Ш. = ^
Тогда получаем 5(2-73; 2; Чтобы найти координаты точки Р, необходимо
определить длину 0Р. По условию задачи, знаем что он составляет — длины
высоты пирамиды 50, получаем 0Р = 76 Тогда Р = (27~; 2;
т»Гг> 76 ~ ^ г 473 476-, ^ ТГг?
Л/Р = , £5 = , найдем их произведение: Л/Р ■
273 473 , 76 476 55=——|—— 0
2) Обозначим буквой М = МР П 55. Тогда прямую МР содержит плоскость ЛМС. Для решения задачи воспользуемся нашей формулой,
приведенной выше: р(Я, (ЛМС)) =
Нам необязательно находить координаты М, т.к. мы знаем координаты других точек А, Р, С £ (ЛМС)
Составим систему для определения коэффициентов. Получим:
0-Л + 4-Я + 0-С + Я = 0 V 5 = 0
Подставим полученные значения в уравнение плоскости и разделим на
— 72 С, чтобы избавиться от буквенного выражения
— — С-х + 0-у + С-2 = 0| : (— — С
Найдем искомое расстояние р( Б, (4МС)) = . = 2— = 2
Таким образом, координатный метод является одним из рациональных методов в решении стереометрических задач. При решении задачи на нахождения расстояния геометрическим способом возникают сложности проведения самого перпендикуляра от точки до данной плоскости и применении стереометрических теорем. Традиционный способ для нахождения угла между прямой и плоскостью или прямыми требует представления и нахождения необходимого угла на чертеже. Координатный метод же позволяет без построения находить искомое расстояние и углы между плоскостью и прямыми. Данный метод будет полезен для уточнения правильности ответа решенной задачи.
Стоит отметить, что данный способ подходит не для всех типов задач.
Например, в таких вопросах, где встречаются тела вращения, как конус, шар, цилиндр и т.д.
1. Атанасян Л.С., Бутузов В.Ф., Кадомцев С.Б., Киселева Л.С., Позняк Э.Г. Учебник. Геометрия. 10-11 классы: учеб. для общеобразовательных учреждений: базовый и профил. уровни. — 22-е изд. — М.: Просвещение, 2013. — 255 с.
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
доцент Беленков Д.А. студент 4 курса факультет «Менеджмент»
Академия Маркетинга и Социально-Информационных технологий —
Российская Федерация, г. Краснодар МИГРАЦИЯ КАК СОЦИАЛЬНЫЙ ФЕНОМЕН
Аннотация: в данной научной статье представлены результаты теоретического обзора миграции как социального феномена. Выделены основные особенности и причины миграционных процессов в мире. Рассмотрены возможные способы благополучной ассимиляции эмигранта как личности в чужую культуру.
Ключевые слова: Миграция, адаптация, социум, культура.
associate professor, Candidate of Economic Sciences Academy of Marketing and Social and Information technologies — IMSIT
Krasnodar, Russian Federation Belenkov D.A. student
4 course, faculty Management Academy of Marketing and Social and Information technologies — IMSIT
Krasnodar, Russian Federation MIGRATION AS A SOCIAL PHENOMENON
Summary: This scientific article presents the results of a theoretical overview of migration as a social phenomenon. Main features and causes of migration processes in the world. The possible ways of successful assimilation of the immigrant as an individual in a foreign culture.
Keywords: Migration, adaptation, society, culture.
В последнее время мы стали все чаще слышать такие, на первый взгляд, очень схожие слова как: эмиграция и иммиграция. Эти два совершенно
Метод координат в пространстве
Для того, чтобы использовать метод координат, надо хорошо знать формулы. Их три:
![]()
- Главная формула — косинус угла φ между векторами a = (x1; y1; z1) и b = (x2; y2; z2):
- Уравнение плоскости в трехмерном пространстве: Ax + By + Cz + D = 0, где A, B, C и D — действительные числа, причем, если плоскость проходит через начало координат, D = 0. А если не проходит, то D = 1.
- Вектор, перпендикулярный к плоскости Ax + By + Cz + D = 0, имеет координаты: n = (A; B; C).
На первый взгляд, выглядит угрожающе, но достаточно немного практики — и все будет работать великолепно.
Задача. Найти косинус угла между векторами a = (4; 3; 0) и b = (0; 12; 5).
Решение. Поскольку координаты векторов нам даны, подставляем их в первую формулу:
![]()
Задача. Составить уравнение плоскости, проходящей через точки M = (2; 0; 1), N = (0; 1; 1) и K = (2; 1; 0), если известно, что она не проходит через начало координат.
Решение. Общее уравнение плоскости: Ax + By + Cz + D = 0, но, поскольку искомая плоскость не проходит через начало координат — точку (0; 0; 0) — то положим D = 1. Поскольку эта плоскость проходит через точки M, N и K, то координаты этих точек должны обращать уравнение в верное числовое равенство.
Подставим вместо x, y и z координаты точки M = (2; 0; 1). Имеем:
A · 2 + B · 0 + C · 1 + 1 = 0 ⇒ 2A + C + 1 = 0;
Аналогично, для точек N = (0; 1; 1) и K = (2; 1; 0) получим уравнения:
A · 0 + B · 1 + C · 1 + 1 = 0 ⇒ B + C + 1 = 0;
A · 2 + B · 1 + C · 0 + 1 = 0 ⇒ 2A + B + 1 = 0;
Итак, у нас есть три уравнения и три неизвестных. Составим и решим систему уравнений:
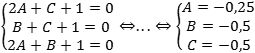
Получили, что уравнение плоскости имеет вид: − 0,25x − 0,5y − 0,5z + 1 = 0.
Задача. Плоскость задана уравнением 7x − 2y + 4z + 1 = 0. Найти координаты вектора, перпендикулярного данной плоскости.
Решение. Используя третью формулу, получаем n = (7; − 2; 4) — вот и все!
Вычисление координат векторов
А что, если в задаче нет векторов — есть только точки, лежащие на прямых, и требуется вычислить угол между этими прямыми? Все просто: зная координаты точек — начала и конца вектора — можно вычислить координаты самого вектора.
Чтобы найти координаты вектора, надо из координат его конца вычесть координаты начала.
Эта теорема одинаково работает и на плоскости, и в пространстве. Выражение «вычесть координаты» означает, что из координаты x одной точки вычитается координата x другой, затем то же самое надо сделать с координатами y и z. Вот несколько примеров:
Задача. В пространстве расположены три точки, заданные своими координатами: A = (1; 6; 3), B = (3; − 1; 7) и C = (− 4; 3; − 2). Найти координаты векторов AB, AC и BC.
Рассмотрим вектор AB: его начало находится в точке A, а конец — в точке B. Следовательно, чтобы найти его координаты, надо из координат точки B вычесть координаты точки A:
AB = (3 − 1; − 1 − 6; 7 − 3) = (2; − 7; 4).
Аналогично, начало вектора AC — все та же точка A, зато конец — точка C. Поэтому имеем:
AC = (− 4 − 1; 3 − 6; − 2 − 3) = (− 5; − 3; − 5).
Наконец, чтобы найти координаты вектора BC, надо из координат точки C вычесть координаты точки B:
BC = (− 4 − 3; 3 − (− 1); − 2 − 7) = (− 7; 4; − 9).
Ответ: AB = (2; − 7; 4); AC = (− 5; − 3; − 5); BC = (− 7; 4; − 9)
Обратите внимание на вычисление координат последнего вектора BC: очень многие ошибаются, когда работают с отрицательными числами. Это касается переменной y: у точки B координата y = − 1, а у точки C y = 3. Получаем именно 3 − (− 1) = 4, а не 3 − 1, как многие считают. Не допускайте таких глупых ошибок!
Вычисление направляющих векторов для прямых
Если вы внимательно прочитаете задачу C2, то с удивлением обнаружите, что никаких векторов там нет. Там только прямые да плоскости.
Для начала разберемся с прямыми. Здесь все просто: на любой прямой найдутся хотя бы две различные точки и, наоборот, любые две различные точки задают единственную прямую.
Кто-нибудь понял, что написано в предыдущем абзаце? Я и сам не понял, поэтому объясню проще: в задаче C2 прямые всегда задаются парой точек. Если ввести систему координат и рассмотреть вектор с началом и концом в этих точках, получим так называемый для прямой:
Зачем нужен этот вектор? Дело в том, что — это угол между их направляющими векторами. Таким образом, мы переходим от непонятных прямых к конкретным векторам, координаты которых легко считаются. Насколько легко? Взгляните на примеры:
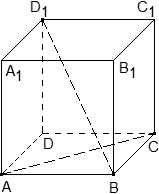
Задача. В кубе ABCDA1B1C1D1 проведены прямые AC и BD1. Найдите координаты направляющих векторов этих прямых.
Поскольку длина ребер куба в условии не указана, положим AB = 1. Введем систему координат с началом в точке A и осями x, y, z, направленными вдоль прямых AB, AD и AA1 соответственно. Единичный отрезок равен AB = 1.
Теперь найдем координаты направляющего вектора для прямой AC. Нам потребуются две точки: A = (0; 0; 0) и C = (1; 1; 0). Отсюда получаем координаты вектора AC = (1 − 0; 1 − 0; 0 − 0) = (1; 1; 0) — это и есть направляющий вектор.
Теперь разберемся с прямой BD1. На ней также есть две точки: B = (1; 0; 0) и D1 = (0; 1; 1). Получаем направляющий вектор BD1 = (0 − 1; 1 − 0; 1 − 0) = (− 1; 1; 1).
Ответ: AC = (1; 1; 0); BD1 = (− 1; 1; 1)
Задача. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, проведены прямые AB1 и AC1. Найдите координаты направляющих векторов этих прямых.
Введем систему координат: начало в точке A, ось x совпадает с AB, ось z совпадает с AA1, ось y образует с осью x плоскость OXY, которая совпадает с плоскостью ABC.
Для начала разберемся с прямой AB1. Тут все просто: у нас есть точки A = (0; 0; 0) и B1 = (1; 0; 1). Получаем направляющий вектор AB1 = (1 − 0; 0 − 0; 1 − 0) = (1; 0; 1).
Теперь найдем направляющий вектор для AC1. Все то же самое — единственное отличие в том, что у точки C1 иррациональные координаты. Итак, A = (0; 0; 0), поэтому имеем:
![]()
Небольшое, но очень важное замечание насчет последнего примера. Если начало вектора совпадает с началом координат, вычисления резко упрощаются: координаты вектора просто равны координатам конца. К сожалению, это верно лишь для векторов. Например, при работе с плоскостями присутствие на них начала координат только усложняет выкладки.
Вычисление нормальных векторов для плоскостей
Нормальные векторы — это не те векторы, у которых все в порядке, или которые чувствуют себя хорошо. По определению, нормальный вектор (нормаль) к плоскости — это вектор, перпендикулярный данной плоскости.
Другими словами, — это вектор, перпендикулярный любому вектору в данной плоскости. Наверняка вы встречали такое определение — правда, вместо векторов речь шла о прямых. Однако чуть выше было показано, что в задаче C2 можно оперировать любым удобным объектом — хоть прямой, хоть вектором.
Еще раз напомню, что всякая плоскость задается в пространстве уравнением Ax + By + Cz + D = 0, где A, B, C и D — некоторые коэффициенты. Не умаляя общности решения, можно полагать D = 1, если плоскость не проходит через начало координат, или D = 0, если все-таки проходит. В любом случае, координаты нормального вектора к этой плоскости равны n = (A; B; C).
Итак, плоскость тоже можно успешно заменить вектором — той самой нормалью. Всякая плоскость задается в пространстве тремя точками. Как найти уравнение плоскости (а следовательно — и нормали), мы уже обсуждали в самом начале статьи. Однако этот процесс у многих вызывает проблемы, поэтому приведу еще парочку примеров:
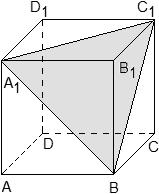
Задача. В кубе ABCDA1B1C1D1 проведено сечение A1BC1. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
Поскольку плоскость не проходит через начало координат, ее уравнение выглядит так: Ax + By + Cz + 1 = 0, т.е. коэффициент D = 1. Поскольку эта плоскость проходит через точки A1, B и C1, то координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 + 1 = 0 ⇒ C + 1 = 0 ⇒ C = − 1;
Аналогично, для точек B = (1; 0; 0) и C1 = (1; 1; 1) получим уравнения:
A · 1 + B · 0 + C · 0 + 1 = 0 ⇒ A + 1 = 0 ⇒ A = − 1;
A · 1 + B · 1 + C · 1 + 1 = 0 ⇒ A + B + C + 1 = 0;
Но коэффициенты A = − 1 и C = − 1 нам уже известны, поэтому остается найти коэффициент B:
B = − 1 − A − C = − 1 + 1 + 1 = 1.
Получаем уравнение плоскости: − A + B − C + 1 = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; − 1).
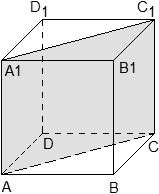
Задача. В кубе ABCDA1B1C1D1 проведено сечение AA1C1C. Найти нормальный вектор для плоскости этого сечения, если начало координат находится в точке A, а оси x, y и z совпадают с ребрами AB, AD и AA1 соответственно.
В данном случае плоскость проходит через начало координат, поэтому коэффициент D = 0, а уравнение плоскости выглядит так: Ax + By + Cz = 0. Поскольку плоскость проходит через точки A1 и C, координаты этих точек обращают уравнение плоскости в верное числовое равенство.
Подставим вместо x, y и z координаты точки A1 = (0; 0; 1). Имеем:
A · 0 + B · 0 + C · 1 = 0 ⇒ C = 0;
Аналогично, для точки C = (1; 1; 0) получим уравнение:
A · 1 + B · 1 + C · 0 = 0 ⇒ A + B = 0 ⇒ A = − B;
Положим B = 1. Тогда A = − B = − 1, и уравнение всей плоскости имеет вид: − A + B = 0, Следовательно, координаты нормального вектора равны n = (− 1; 1; 0).
Вообще говоря, в приведенных задачах надо составлять систему уравнений и решать ее. Получится три уравнения и три переменных, но во втором случае одна из них будет свободной, т.е. принимать произвольные значения. Именно поэтому мы вправе положить B = 1 — без ущерба для общности решения и правильности ответа.
Координаты середины отрезка
Очень часто в задаче C2 требуется работать с точками, которые делят отрезок пополам. Координаты таких точек легко считаются, если известны координаты концов отрезка.
Итак, пусть отрезок задан своими концами — точками A = (xa; ya; za) и B = (xb; yb; zb). Тогда координаты середины отрезка — обозначим ее точкой H — можно найти по формуле:
![]()
Другими словами, координаты середины отрезка — это среднее арифметическое координат его концов.
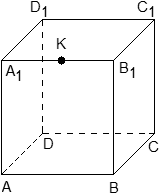
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Точка K — середина ребра A1B1. Найдите координаты этой точки.
Поскольку точка K — середина отрезка A1B1, ее координаты равных среднему арифметическому координат концов. Запишем координаты концов: A1 = (0; 0; 1) и B1 = (1; 0; 1). Теперь найдем координаты точки K:
![]()
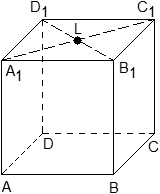
Задача. Единичный куб ABCDA1B1C1D1 помещен в систему координат так, что оси x, y и z направлены вдоль ребер AB, AD и AA1 соответственно, а начало координат совпадает с точкой A. Найдите координаты точки L, в которой пересекаются диагонали квадрата A1B1C1D1.
Из курса планиметрии известно, что точка пересечения диагоналей квадрата равноудалена от всех его вершин. В частности, A1L = C1L, т.е. точка L — это середина отрезка A1C1. Но A1 = (0; 0; 1), C1 = (1; 1; 1), поэтому имеем:
![]()
Ответ : L = (0,5; 0,5; 1)
Смотрите также:
- Введение системы координат

- Четырехугольная пирамида в задаче C2
- В 2012 году ЕГЭ по математике станет двухуровневым?

- Сводный тест по задачам B12 (1 вариант)
- Симметрия корней и оптимизация ответов в тригонометрии
- ЕГЭ 2022, задание 6. Касательная и уравнение с параметром
- Вход для учеников
- ЕГЭ-2024
- Часть 1
- 1. Уравнения
- 2. Вероятность
- 3. Планиметрия
- 4. Тригонометрия
- 5. Стереометрия
- 6. Производные
- 7. Формулы
- 8. Текстовые задачи
- 11. Экстремумы функций
- Часть 2
- 12. Тригонометрические уравнения
- 13. Сложная стереометрия
- 14. Сложные неравенства
- 15. Экономические задачи
- 16. Сложная планиметрия
- 17. Задачи с параметром
- 18. Теория чисел
- Архив
- X1. Движение и время
- X2. Графики
- X3. Площади
- X4. Стереометрия
- X5. Экономика
- Об экзамене
- Советы
- 2014
- 2015
- 2016
- 2017
- 2018
- 2019
- Школьникам
- Студентам
- Реклама
- Обо мне
- © 2010—2024 ИП Бердов Павел Николаевич
ИНН 760708479500; ОГРНИП 309760424500020 - При использовании материалов ссылка на сайт обязательна
Телефон: +7 (963) 963-99-33; почта: pavel@berdov.com - Карта сайта
Метод координат
Для решения задачи по стереометрии координатным методом нужно выбрать декартову систему координат. Ее можно выбрать как угодно, главное, чтобы она была удобной. Приведем примеры выбора системы координат в кубе, пирамиде и конусе:
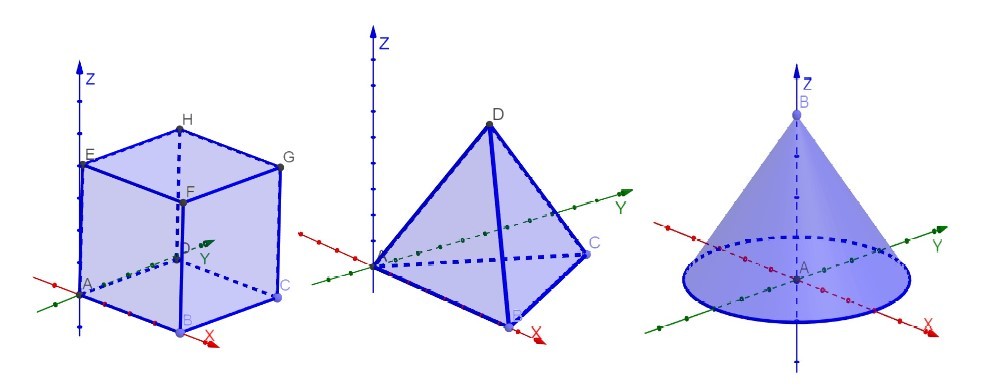
Примеры выбора системы координат
Далее необходимо найти координаты основных точек в выбранной системе координат. Это могут быть вершины объемной фигуры, середины ребер или любые другие точки, указанные в условии задачи. Найдем координаты куба и правильной пирамиды (предположим, что все ребра равны \(4\)):
Куб: Очевидно, что координаты точки \(A\) в начале координат — \((0;0;0)\). т. \(B\) — \((4;0;0)\), т. \(G\) — \((4;4;4)\) и т.д. (Рис. 1).
С кубом все просто, но в других фигурах могут возникнуть трудности с нахождением координат.
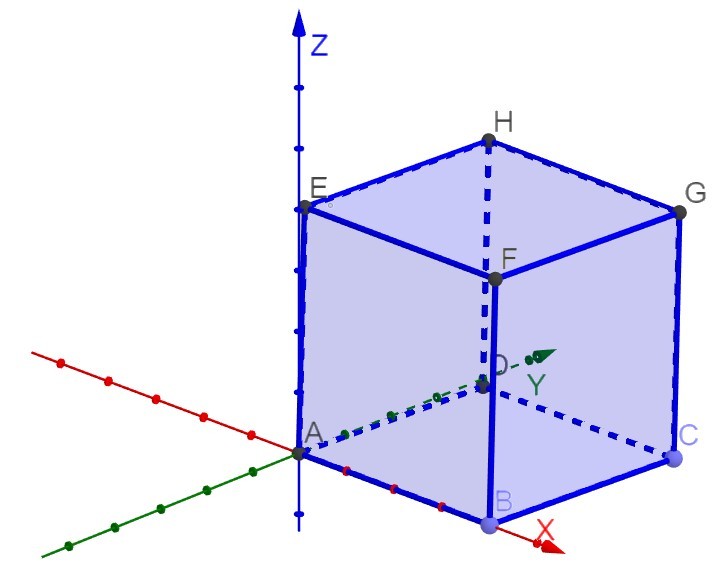
Рис. 1. Координаты вершин куба
- У \(т. A\) координаты \((0;0;0)\), потому что она лежит в начале координат.
- Координату \(x\) точки \(С\) можно получить, опустив перпендикуляр \(CE\) из \(т.С\) на ось \(OX\). (см. Рис. 2). Получится \(т.E\), указывающая на искомую координату по \(x\) – 2. Координату \(y\) точки \(С\) тоже получаем, опустив перпендикуляр \(CF\) на ось \(OY\). Координата \(y\) \(т.С\) будет равна длине отрезка \(AF=CE\). Найдем его по теореме Пифагора из треугольника \(AFC\): $$ ^2=^2+^2,$$ $$ 4^2=2^2+^2,$$ $$ CE=\sqrt. $$ Координата \(z\) точки \(C\), очевидно, равна \(0\), потому что \(т.С\) лежит в плоскости \(XOY\). $$ C (2;\sqrt; 0). $$
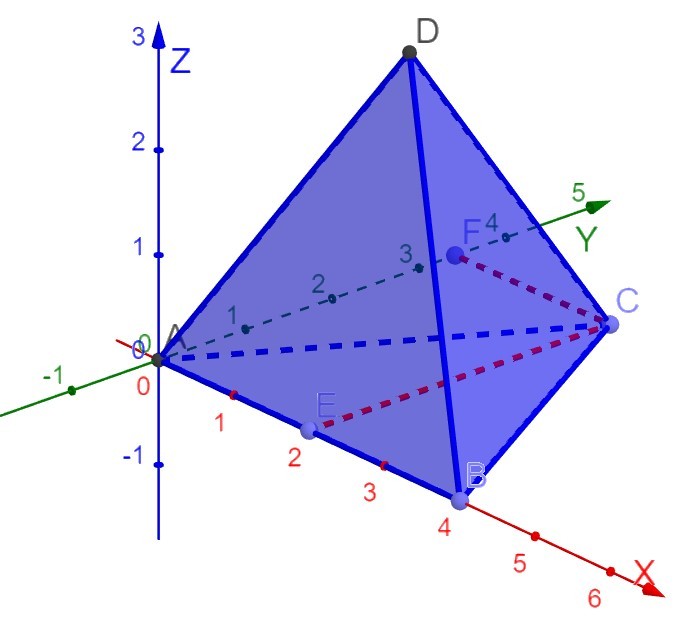
Рис.1. Координаты точки С
И найдем координаты вершины пирамиды (\(т.D\)). (Рис. 3) Координаты \(X\) и \(Y\) у точки \(D\) совпадают с координатами \(X\) и \(Y\) у точки \(H\). Напомню, что высота правильной треугольной пирамиды падает в точку пересечения медиан, биссектрис и высот. Отрезок \(EH=\frac*CE=\frac*\sqrt\) (медианы в треугольнике точкой пересечения делятся в отношении как \(\frac\)) и равен координате точки \(D\) по \(Y\). Длина отрезка \(IH=2\) будет равна координате точки \(D\) по \(X\). А координата по оси \(Z\) равна высоте пирамиде: $$ ^2=^2+^2, $$ $$ =\sqrt*AF>^2>, $$ $$ =\frac. $$ $$ D (2, \frac*\sqrt, \frac). $$
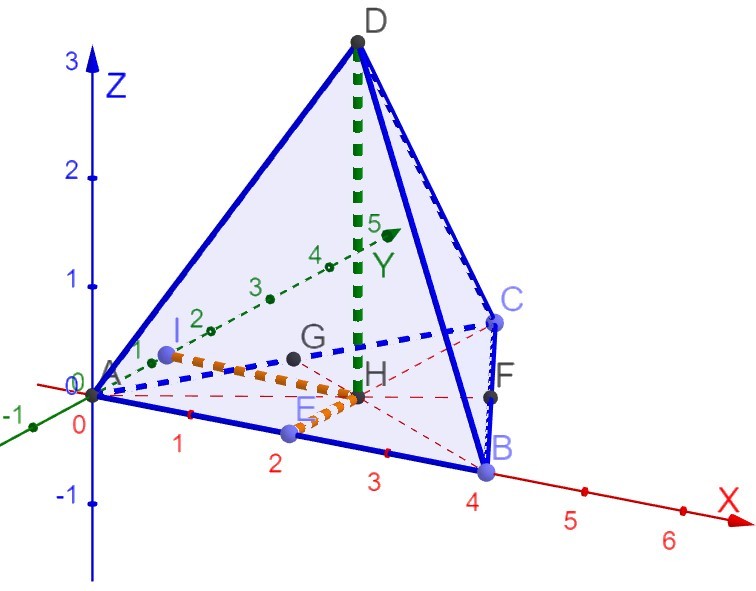
Рис. 3. Координаты точки D
Координаты вектора
Вектор – отрезок, имеющий длину и указывающий направление.
На самом деле, понимать, что такое вектор для решения задач методом координат необязательно. Можно просто использовать это понятие, как необходимый инструмент для решения задач по стереометрии. Любое ребро или отрезок на нашей фигуре мы будем называть вектором.
Для того, чтобы определить координаты вектора, нужно из координат конечной точки вычесть координаты начальной точки. Пусть у нас есть две точки (Рис. 4) : $$ т.А(x_A,y_A,z_A); $$ $$ т.B(x_B,y_B,z_B); $$ Тогда координаты вектора \(\vec\) можно определить по формуле: $$ \vec=. $$
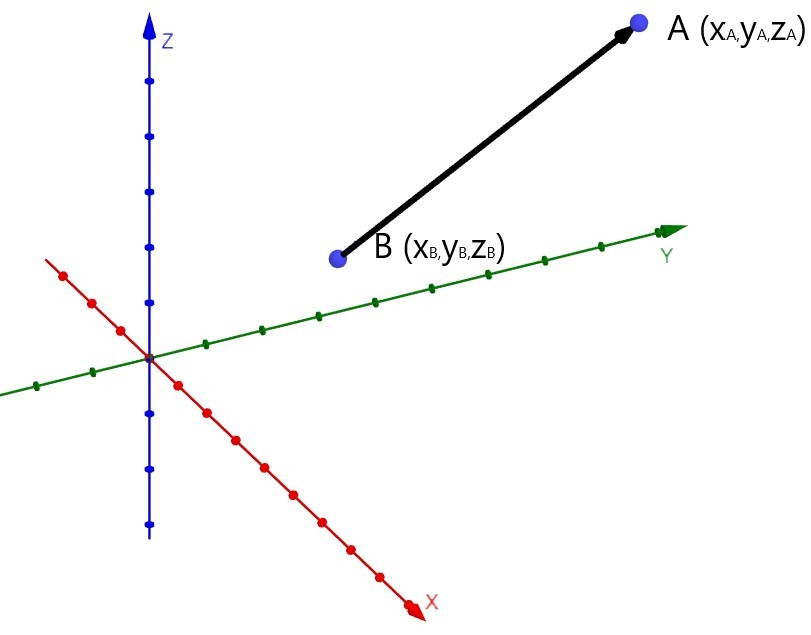
Рис. 4. Координаты вектора
Скрещивающиеся прямые
И так, мы научились находить координаты точек, и при помощи них определять координаты векторов. Теперь познакомимся с формулой нахождения косинуса угла между скрещивающимися прямыми (векторами). Пусть даны два вектора: $$ a=;$$ $$ b=; $$ тогда угол \(\alpha\) между ними находится по формуле: $$ \cos=\frac^2+^2+^2>*\sqrt^2+^2+^2>>. $$
Уравнение плоскости
В задачах №14 (С2) ЕГЭ по профильной математике часто требуется найти угол между прямой и плоскостью и расстояние между скрещивающимися прямыми. Но для этого вы должны уметь выводить уравнение плоскости. В общем виде уравнение плоскости задается формулой: $$ A*x+B*y+C*z+D=0,$$ где \(A,B,C,D\) – какие-то числа.
Если найти \(A,B,C,D\), то мы мы найдем уравнений плоскости. Плоскость однозначно задается тремя точками в пространстве, значит нужно найти координаты трех точек, лежащий в данной плоскости, а потом подставить их в общее уравнение плоскости.
Например, пусть даны три точки:
Подставим координаты точек в общее уравнение плоскости:
$$\begin A*x_K+B*y_K+C*z_K+D=0,\\ A*x_L+B*y_L+C*z_L+D=0, \\ A*x_P+B*y_P+C*z_P+D=0.\end$$
Получилась система из трех уравнений, но неизвестных 4: \(A,B,C,D\). Если наша плоскость не проходит через начало координат, то мы можем \(D\) приравнять \(1\), если же проходит, то \(D=0\). Объяснение этому простое: вы можете поделить каждое ваше уравнения на \(D\), от этого уравнение не изменится, но вместо \(D\) будет стоять \(1\), а остальные коэффициенты будут в \(D\) раз меньше.
Теперь у нас есть три уравнения и три неизвестные – можем решить систему:
Найти уравнение плоскости, проходящей через точки $$ K(1;2;3);\,P(0;1;0);\,L(1;1;1). $$ Подставим координаты точек в уравнение плоскости \(D=1\): $$\begin A*1+B*2+C*3+1=0,\\ A*0+B*1+C*0+1=0, \\ A*1+B*1+C*1+1=0.\end$$ $$\begin A+2*B+3*C+1=0,\\ B+1=0, \\ A+B+C+1=0.\end$$ $$\begin A-2+3*C+1=0,\\ B=-1, \\ A=-C.\end$$ $$\begin A=-0.5,\\ B=-1, \\ C=0.5.\end$$ Получаем искомое уравнение плоскости: $$ -0.5x-y+0.5z+1=0.$$
Расстояние от точки до плоскости
Зная координаты некоторой точки \(M(x_M;y_M;z_M)\), легко найти расстояние до плоскости \(Ax+By+Cz+D=0:\) $$ \rho=\frac<|A*x_M+B*y_M+C*z_M+D|>>. $$
Найдите расстояние от т. \(H (1;2;0)\) до плоскости, заданной уравнением $$ 2*x+3*y-\sqrt*z+4=0.$$
Из уравнения плоскости сразу находим коэффициенты: $$ A=2,\,B=3,\,C=-\sqrt,\,D=4.$$ Подставим их в формулу для нахождения расстояния от точки до плоскости. $$ \rho=\frac<|2*1+3*2-\sqrt*0+4|><\sqrt<2^2+3^2+<-\sqrt>^2>>. $$ $$ \rho=\frac>=3.$$
Расстояние между скрещивающимися прямыми
Расстояние между скрещивающимися прямыми – это расстояние от любой точки одной из прямых до параллельной ей плоскости, проходящей через вторую прямую.
Таким образом, если требуется найти расстояние между скрещивающимися прямыми, то нужно через одну из них провести плоскость параллельно второй прямой. Затем найти уравнение этой плоскости и по формуле расстояния от точки до плоскости найти расстояние между скрещивающимися прямыми. Точку на прямой можно выбрать произвольно (у которой легче всего найти координаты).
Рассмотрим задачу из досрочного ЕГЭ по математике 2018 года.
- Докажите, что прямые \(AD\) и \(BG\) перпендикулярны.
- Найдите расстояние между прямыми \(AD\) и \(BG\).
Решим задачу полностью методом координат.
Нарисуем рисунок и выберем декартову систему координат. (Рис 5).