Спутниковая связь: Как работает и зачем нам нужны технологии в космосе
Статья рассказывает о технологиях спутниковой связи, принципе их работы, типах систем, преимуществах и недостатках, а также о применении и современных тенденциях развития этой технологии.
Спутниковая связь: Как работает и зачем нам нужны технологии в космосе обновлено: 2 октября, 2023 автором: Научные Статьи.Ру
Помощь в написании работы
Введение
В данной лекции мы рассмотрим технологии спутниковой связи. Спутниковая связь – это метод передачи информации с помощью искусственных спутников, находящихся в космосе. Она играет важную роль в современном мире, обеспечивая широкий охват и высокую скорость передачи данных. Мы изучим принцип работы спутниковой связи, различные типы спутниковых систем, их преимущества и недостатки, а также применение и современные тенденции развития этой технологии.
Нужна помощь в написании работы?
Мы — биржа профессиональных авторов (преподавателей и доцентов вузов). Наша система гарантирует сдачу работы к сроку без плагиата. Правки вносим бесплатно.
Определение технологий спутниковой связи
Технологии спутниковой связи – это совокупность методов и средств, которые позволяют передавать информацию между двумя или более точками на Земле с помощью спутников, находящихся в космосе.
Спутниковая связь основана на использовании искусственных спутников Земли, которые находятся на орбите вокруг планеты. Эти спутники оборудованы специальными антеннами и приемно-передающими устройствами, которые позволяют им получать и передавать сигналы связи.
Технологии спутниковой связи широко применяются в различных областях, включая телекоммуникации, телевидение, радиосвязь, интернет-соединение и навигацию. Они обеспечивают глобальное покрытие и могут быть использованы в удаленных и труднодоступных районах, где проведение проводной связи невозможно или нецелесообразно.
Технологии спутниковой связи позволяют передавать голосовую информацию, данные, видео и другие формы коммуникации на большие расстояния. Они основаны на использовании радиоволн, которые передаются между земными станциями и спутниками.
Одним из ключевых элементов технологий спутниковой связи является геостационарная орбита, на которой находятся спутники. Эта орбита находится на высоте около 36 000 километров над экватором и обеспечивает постоянное покрытие определенной области Земли.
Технологии спутниковой связи имеют свои преимущества и недостатки, которые необходимо учитывать при их применении. Однако, они играют важную роль в современном мире, обеспечивая надежную и глобальную связь между людьми и организациями.
Принцип работы спутниковой связи
Спутниковая связь основана на использовании спутников, которые находятся на геостационарной орбите вокруг Земли. Эти спутники обеспечивают передачу сигналов между различными точками на поверхности Земли.
Принцип работы спутниковой связи состоит из нескольких этапов:
Передача сигнала
Сигнал передается от источника, например, сотового телефона или компьютера, к спутнику. Это происходит через антенну, которая направляет сигнал в сторону спутника.
Передача сигнала к спутнику
Сигнал достигает спутника, который находится на геостационарной орбите. Спутник принимает сигнал и передает его обратно на Землю.
Передача сигнала на Землю
Сигнал, полученный спутником, передается на Землю через другую антенну, которая находится в приемной станции или специальном устройстве.
Передача сигнала получателю
Сигнал, полученный на Земле, передается дальше к конечному получателю, например, к другому телефону или компьютеру. Это происходит через проводную или беспроводную сеть.
Таким образом, спутниковая связь позволяет передавать сигналы на большие расстояния и обеспечивает глобальное покрытие, что делает ее особенно полезной для коммуникации в отдаленных и труднодоступных местах.
Типы спутниковых систем связи
Геостационарные спутниковые системы связи
Геостационарные спутниковые системы связи (ГССС) используют спутники, которые находятся на геостационарной орбите вокруг Земли. Это означает, что спутник остается неподвижным относительно поверхности Земли и находится на высоте около 36 000 километров. ГССС обеспечивают широкое покрытие и стабильную связь, но требуют высокой мощности передатчика и могут иметь задержку в передаче данных.
Низкоорбитальные спутниковые системы связи
Низкоорбитальные спутниковые системы связи (НССС) используют спутники, которые находятся на низкой орбите вокруг Земли, на высоте от 500 до 2000 километров. Эти спутники движутся быстрее геостационарных спутников и обеспечивают более низкую задержку в передаче данных. НССС обычно требуют сети из нескольких спутников для обеспечения непрерывного покрытия и передачи данных.
Мобильные спутниковые системы связи
Мобильные спутниковые системы связи предназначены для передачи данных и связи в движении. Они используют спутники, которые находятся на геостационарной или низкой орбите и обеспечивают связь для мобильных устройств, таких как смартфоны, ноутбуки и автомобильные системы связи. Мобильные спутниковые системы связи позволяют обеспечить связь в отдаленных и недоступных местах, где нет других средств связи.
Глобальные спутниковые системы навигации
Глобальные спутниковые системы навигации (ГССН) предназначены для определения местоположения и навигации. Они используют сеть спутников, которые передают сигналы, которые принимаются приемниками на Земле. Наиболее известной ГССН является система GPS (Глобальная система позиционирования), которая использует спутники, находящиеся на низкой орбите, для определения местоположения с высокой точностью.
Преимущества и недостатки спутниковой связи
Преимущества:
1. Глобальное покрытие: Спутниковая связь позволяет обеспечить связь в любой точке Земли, даже в отдаленных и недоступных местах, где нет других средств связи. Это особенно важно для обеспечения связи в отдаленных районах, на море или в горных районах.
2. Высокая пропускная способность: Спутниковые системы связи обладают высокой пропускной способностью, что позволяет передавать большие объемы данных, включая видео и аудио потоки, с высокой скоростью. Это особенно важно для передачи данных в реальном времени, например, для видеоконференций или трансляций спортивных событий.
3. Устойчивость к неблагоприятным погодным условиям: Спутниковая связь не зависит от погодных условий, таких как дождь, снег или туман, которые могут повлиять на качество связи в других средствах связи, например, в проводных или радиосвязных системах.
4. Быстрое развертывание: Спутниковые системы связи могут быть быстро развернуты и введены в эксплуатацию. Нет необходимости строить сложную инфраструктуру, как в случае с проводными сетями, что позволяет быстро обеспечить связь в чрезвычайных ситуациях или во время временных мероприятий.
Недостатки:
1. Высокая задержка: Сигналы, передаваемые через спутник, должны пройти большое расстояние, что приводит к высокой задержке в передаче данных. Это может быть проблемой для приложений, требующих низкой задержки, например, для интерактивных игр или голосовых вызовов.
2. Высокая стоимость: Спутниковая связь требует дорогостоящего оборудования и инфраструктуры, а также платы за использование спутниковых услуг. Это делает ее менее доступной для некоторых пользователей или регионов.
3. Влияние на окружающую среду: Запуск и эксплуатация спутников может иметь негативное влияние на окружающую среду, включая создание космического мусора и выбросы ракетного топлива.
4. Ограниченная пропускная способность: В отличие от проводных сетей, спутниковая связь имеет ограниченную пропускную способность, которая может быть разделена между множеством пользователей. Это может привести к снижению скорости передачи данных в периоды пиковой нагрузки.
Применение технологий спутниковой связи
Технологии спутниковой связи имеют широкий спектр применений в различных областях. Вот некоторые из них:
Телекоммуникации
Спутниковая связь играет важную роль в обеспечении глобальной телекоммуникации. Спутники позволяют передавать голосовые и видео сигналы на большие расстояния, что делает возможным межконтинентальные телефонные звонки, трансляции телевизионных программ и интернет-соединение в отдаленных районах, где проводная связь недоступна.
Навигация
Спутниковая навигация используется для определения местоположения и навигации в реальном времени. Системы, такие как GPS (Глобальная система позиционирования), GLONASS (Глобальная навигационная спутниковая система) и Galileo, используют сеть спутников для передачи сигналов, которые позволяют пользователям определить свое местоположение с высокой точностью.
Метеорология
Спутники играют важную роль в метеорологических наблюдениях и прогнозах. Они могут наблюдать Землю из космоса и передавать данные о погоде, облаках, температуре и других параметрах атмосферы. Эти данные используются для составления прогнозов погоды и мониторинга климатических изменений.
Спасательные операции
Спутниковая связь играет важную роль в спасательных операциях и поиске людей в беде. Спутники могут использоваться для передачи сигналов бедствия и определения местоположения людей в отдаленных или труднодоступных районах. Это позволяет спасателям быстро реагировать и оказывать помощь в случае чрезвычайных ситуаций.
Научные исследования
Спутники используются для проведения научных исследований в различных областях, таких как астрономия, геология, экология и климатология. Они могут наблюдать и изучать удаленные регионы Земли, а также космическое пространство, предоставляя ученым ценные данные и информацию.
Это лишь некоторые примеры применения технологий спутниковой связи. Спутниковая связь продолжает развиваться и находить новые области применения, что делает ее незаменимой в современном мире.
Современные тенденции развития спутниковой связи
Спутниковая связь продолжает развиваться и прогрессировать, открывая новые возможности и улучшая существующие технологии. Вот некоторые из современных тенденций развития спутниковой связи:
Увеличение пропускной способности
Одной из главных тенденций развития спутниковой связи является увеличение пропускной способности спутниковых систем. Современные спутники обладают более высокой пропускной способностью, что позволяет передавать больше данных и обеспечивать более быструю и стабильную связь.
Развитие спутникового интернета
Спутниковый интернет становится все более популярным и доступным. Спутниковые системы связи позволяют обеспечить доступ к интернету в удаленных и отдаленных регионах, где проводная связь недоступна или неэффективна. Это особенно важно для развивающихся стран и отдаленных районов, где спутниковая связь может стать единственным способом подключения к мировой сети.
Развитие спутниковой навигации
Спутниковая навигация, такая как система GPS (Глобальная система позиционирования), стала неотъемлемой частью нашей повседневной жизни. Современные тенденции развития спутниковой навигации включают улучшение точности и надежности системы, а также расширение ее функциональности. Например, разработка новых спутниковых систем, таких как ГЛОНАСС и Galileo, позволяет улучшить навигацию и позиционирование в различных регионах мира.
Развитие спутникового телевидения
Спутниковое телевидение продолжает развиваться и предлагать более широкий выбор каналов и программ. Современные спутниковые системы телевидения обеспечивают высокое качество изображения и звука, а также возможность просмотра программ в высоком разрешении (HD) и даже в формате Ultra HD (4K).
Развитие спутниковой связи для мобильных устройств
Спутниковая связь становится все более важной для мобильных устройств, таких как смартфоны и планшеты. Современные тенденции развития спутниковой связи включают улучшение сигнала и покрытия, а также разработку специальных спутниковых антенн и модулей для мобильных устройств, чтобы обеспечить более надежную и стабильную связь в любых условиях.
Это лишь некоторые из современных тенденций развития спутниковой связи. Будущее спутниковой связи обещает еще больше инноваций и улучшений, что делает ее незаменимой в современном мире.
Таблица сравнения спутниковой связи
| Аспект | Спутниковая связь | Проводная связь |
|---|---|---|
| Расстояние передачи данных | Глобальное покрытие | Ограниченное расстояние |
| Скорость передачи данных | Высокая | Высокая |
| Надежность | Зависит от погодных условий | Стабильная |
| Стоимость | Высокая | Низкая |
| Мобильность | Высокая | Ограниченная |
Заключение
Технологии спутниковой связи играют важную роль в современном мире. Они позволяют передавать данные и обеспечивать связь на большие расстояния, что особенно полезно в удаленных и труднодоступных районах. Спутниковая связь имеет свои преимущества, такие как широкий охват, высокая скорость передачи данных и надежность, но также сопровождается некоторыми недостатками, включая высокую стоимость и задержку сигнала. В будущем можно ожидать развития спутниковых систем связи, с улучшением технологий и расширением их применения в различных сферах жизни.
Спутниковая связь: Как работает и зачем нам нужны технологии в космосе обновлено: 2 октября, 2023 автором: Научные Статьи.Ру
Принципы навигации
Ключевые составляющие спутникового комплекса навигации
Космическая составляющая
Космическая сфера, включающая спутниковые аппараты навигации, является комплексом источников сигналов радионавигации, которые отправляют в одно время огромное количество служебных данных. Ключевые функции каждого спутникового аппарата – создание и отправка радиосигналов, требуемых для потребительских навигационных определений и отслеживания работы бортовых спутниковых устройств.
Наземная составляющая
Наземная составляющая содержит космодром, командно-измерительный пункт и управляющий отдел. Космодром используется для доставки спутниковых единиц на нужные высоты при изначальном обустройстве комплекса навигации, а также время от времени он позволяет восполнять космические аппараты после их повреждения либо изнашивания. Ключевую инфраструктуру космодрома составляют техническая позиция и система запуска. Первый объект позволяет принимать, хранить, собирать ракеты-носители и спутниковые аппараты, испытывать их, заправлять и состыковывать. Второй объект позволяет доставлять носитель со спутниковым аппаратом навигации в точку отправления, устанавливать на систему запуска, проходить тесты перед запуском, заправлять носитель, наводить и запускать.
Командно-измерительная система позволяет снабжать спутниковые аппараты навигации служебными данными, требуемыми для организации сеансов навигации, контролировать и управлять ими как спутниками.
Управляющий комплекс, имеющий связь посредством радиолиний информации и управления с космодромом и командно-измерительной системой, способствует координации работы всех составляющих спутникового комплекса навигации.
Пользовательская составляющая
Пользовательская составляющая включает потребительское оборудование. Оно принимает сигналы от космической кораблей навигации, измеряет показатели навигации и обрабатывает полученные значения. Для того, чтобы решать задачи навигации, в потребительском оборудовании имеется особое вмонтированное устройство. Обилие видов имеющегося потребительского оборудования покрывает нужды наземных, морских, авиационных, космических (не дальше ближнего космического пространства) пользователей.
Функционирование комплекса навигации
Новейшая спутниковая навигация базируется на следовании теории дальномерных измерений без запросов между спутниковыми аппаратами навигации и пользователем. Это свидетельствует о том, что пользователь получает вместе с навигационным сигналом сведения о местонахождении космических аппаратов. В это же время измеряются расстояния до навигационных спутниковых аппаратов. Метод измерения этих расстояний базируется на расчете временных задержек поступающего сигнала от спутникового аппарата по сравнению с оригиналом, который генерируется потребительским оборудованием.
На рисунке изображен график расчета местонахождения пользователя с координатами x, y, z на базе расчета расстояний до 4-х навигационных спутниковых аппаратов. Разноцветными жирными линиями выделены окружности, в середине которых разместились спутниковые аппараты. Радиусы окружностей можно соотнести с реальными расстояниями, то есть фактическими расстояниями между спутниковыми аппаратами и пользователями. Разноцветные неяркие линии – это окружности с радиусами, которые можно соотнести с рассчитанными расстояниями, отличающимися от реальных и называемыми по этой причине псевдодальностями. Отличие реальной дальности от псевдодальности – значение, представляющее собой произведение скорости света на уход часов b, то есть значение смещения часов пользователя относительно системного времени. На картинке отображена ситуация, когда уход потребительских часов превышает “0” – т. е. потребительские часы идут с опережением времени системы, вследствие чего рассчитанные псевдодальности уступают реальным дальностям.
В идеале, когда расчеты выполняются верно и значения спутниковых и потребительских часов ничем не отличаются, чтобы выяснить пространственное местоположение пользователя, требуется лишь рассчитать до 3-х спутниковых аппаратов навигации.
По факту значения, которые показывают часы, входящие в состав потребительского оборудования навигации, не совпадают с показаниями бортовых часов навигационных спутниковых аппаратов. В этой ситуации для решения задачи навигации к неизвестным до этого значениям (3 потребительских координаты) нужно добавить дополнительный – смещение между потребительскими часами и временем системы. Следовательно, в общей ситуации, чтобы решить задачу навигации, пользователь должен “отслеживать” по меньшей мере четыре спутниковых аппарата навигации.
Системы координат
Для нормального функционирования спутниковых комплексов навигации нужны сведения о характеристиках вращения нашей планеты, ключевые лунные и планетарные эфемериды, информация о земном гравитационном поле, об атмосферных разновидностях, сверхточные сведения о действующих координатных и временных системах.
Геоцентрическими системами координат называются системы координат, точка отсчета которых располагается в центре масс нашей планеты. Их другое название – общеземные либо глобальные.
Для создания и обслуживания общеземных систем координат применяются 4 главных способа космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ);
- лазерная локация космических кораблей;
- доплеровские системы измерения;
- навигационные измерения космических кораблей ГЛОНАСС и прочих глобальных спутниковых комплексов навигации.
Международная земная система координат ITRF – это идеальная модель земной системы координат.
В новейших спутниковых комплексах навигации применяются разные, в большинстве случаев отечественные, системы координат.
Временные системы
Исходя из вида задачи, которую нужно решить, применяются 2 разновидности систем времени: астрономические и атомные.
Системы астрономического времени зависят от суточного вращения нашей планеты. Идеальной моделью для создания шкал астрономического времени являются солнечные либо звездные сутки. Это зависит от местоположения точки на небе, по которой измеряется время.
Всемирное время UT – среднее солнечное время на меридиане Гринвича.
Всемирное координированное время UTC – имеет синхронизацию с атомным временем и считается стандартным во всех странах, по которому сверяется национальное время.
Атомное время – время, измеряемое с помощью электромагнитных колебаний, исходящих от атомов либо молекул во время их изменения своего энергетического состояния. В 1967 г. на Генеральной конференции мер и весов было выяснено, что атомная секунда выступает в роли перехода между самыми тонкими уровнями F=4, M=0 и F=3, M=0 главного состояния 2S1/2 атома цезия-133, на который не влияют внешние поля, и что частоте данного перехода соответствует величина 9 192 631 770 Гц.
Спутниковый комплекс радионавигации выступает пространственно-временной системой, действует в зоне, покрывающей все пространство около Земли, и использует свое время системы. Ключевое значение в глобальных спутниковых комплексах навигации имеет вопрос синхронизации подсистем по времени. Синхронизация по времени имеет большое значение и для сохранения определенного порядка передачи сигналов всех спутниковых аппаратов навигации. Она позволяет применять пассивные дальномерные (псевдодальномерные) измерительные способы. Наземный командно-измерительный комплекс позволяет синхронизировать временные шкалы всех космических кораблей навигации способом их проверки и изменения (непосредственного и алгоритмического).
Радиосигналы навигации
Выбирая разновидности и показатели сигналов, которые применяются в спутниковых комплексах радионавигации, требуется принимать к сведению множество правил и условностей. От сигналов требуются гарантии получения высокоточных измерений времени поступления (задержки) сигнала и его доплеровской частоты, а также повышенной вероятности верной расшифровки навигационных данных. Еще сигналы должны обладать пониженным уровнем взаимной корреляции, чтобы сигналы различных навигационных спутников без труда различались навигационным потребительским оборудованием. Помимо этого, сигналы глобальных спутниковых комплексов навигации должны с наибольшей эффективностью пользоваться выделенной частотной полосой при низком уровне излучения вне полосы, отличаться значительной устойчивостью к помехам.

Практически все действующие спутниковые комплексы навигации, кроме комплекса NAVIC из Индии, применяют для отправки сигналов диапазона L. Этот индийский комплекс будет отправлять сигналы еще и в S-диапазоне.
Типы модуляции
С усовершенствованием спутниковых комплексов навигации подвергались изменению применяемые типы модуляции радиосигналов.
Во многих системах навигации сперва применялись только сигналы с бинарной (2-хпозиционной) фазовой модуляцией – ФМ-2. Сегодня в спутниковых комплексах навигации происходит переход к иному модуляционному типу, называющемуся BOC-сигналами.
BOC-сигналы отличаются от сигналов с ФМ-2 главным образом тем, что символ моделирующей ПСП BOC-сигнала является не видеоимпульсом в форме прямоугольника, а участком меандрового колебания, который включает в себя заданное неизменное количество периодов k. По этой причине сигналы с BOC-модуляцией зачастую носят название “меандровые шумоподобные сигналы”.
Применение сигналов с BOC-модуляцией способствует повышению потенциальных точностных характеристик измерения и разрешающего показателя по задержке. В это же время сокращается уровень взаимных помех при одновременной работе систем навигации, применяющих классические и обновленные сигналы.
Навигационная информация
Все спутниковые аппараты получают от наземных управляющих станций навигационные данные, передаваемые обратно потребителям в составе навигационного сообщения. Навигационные сообщения включают в себя различные данные, нужные для определения координат потребителя и синхронизации его временной шкалы со стандартом, использующимся в стране.
Виды сведений навигационного сообщения:
- эфемеридные данные, требуемые для определения координат спутникового аппарата с приемлемыми точностными характеристиками;
- погрешность расхождения временной шкалы на борту с системной временной шкалой для того, чтобы учитывать временные смещения космического корабля при измерениях навигации;
- различия между временной шкалой системы навигации и национальной временной шкалой, требуемые для того, чтобы решить задачи синхронизации пользователей;
- признаки пригодности со сведениями о состоянии спутникового аппарата для быстрого исключения космических аппаратов с обнаруженными отказами из навигационного решения;
- комплекс данных об орбитах и состоянии каждого корабля в группе для долговременного детального прогнозирования перемещений космических кораблей и составления планов измерений;
- характеристики модели ионосферы, которые нужны одночастотным устройствам приема для того, чтобы компенсировать неточности навигационных измерений, вызванных замедлением перемещения сигналов в ионосфере;
- характеристики вращения нашей планеты для точности обнаружения потребительского местонахождения во всех системах координат.
Обновление признаков пригодности происходит через пару сек. при выявлении отказа. Эфемеридные и временные характеристики обычно обновляются каждые 30 мин. или реже. Кроме того, срок обновления для различных комплексов индивидуален и может составлять 4 ч., а вот обновление альманаха происходит только раз в 24 часа или реже.
По типу содержащихся сведений навигационное сообщение бывает оперативным и неоперативным и отправляется в форме потока цифровой информации. Поначалу в каждом спутниковом комплексе навигации применялась структура типа “суперкадр/кадр/строка/слово”. При такой структуре поток цифровых данных представляет собой последовательность сменяющих друг друга суперкадров, в составе суперкадра — ряд кадров, в составе кадра – ряд строк.
Согласно структуре “суперкадр/кадр/строка/слово” создавались сигналы комплексов БЭЙДОУ, ГАЛИЛЕО (за исключением E6), GPS (LNAV информация, L1), сигналы российского глобального спутникового комплекса навигации с разделением по частотам. Исходя из типа комплекса размеры суперкадров, кадров и строк имеют различия, а вот метод формирования не меняется.
Сегодня почти во всех сигналах применяется гибкая структура строки. В такой структуре навигационное сообщение создается в форме непостоянной последовательности строк разных видов. Каждая разновидность строки обладает собственной индивидуальной структурой и имеет в составе заданный тип данных (об этом рассказывалось выше). Навигационная потребительская аппаратура находит в потоке следующую строку, выявляет ее разновидность и на основании этого собирает данные, имеющиеся в данной строке.
Гибкая структура строки навигационного сообщения помогает гораздо продуктивнее работать с пропускной способностью канала отправки информации. Однако основное преимущество навигационного сообщения с гибкой структурой строки – это возможность ее эволюционного обновления при следовании условию обратной совместимости. Для этих целей в интерфейсно-контрольном документе для создателей навигационной пользовательской аппаратуры отдельно обозначается, что, если потребительское оборудование навигации в навигационном сообщении обнаруживает нетипичные строки, оно будет их просто пропускать. Это предоставляет возможность добавления во время обновления глобального спутникового комплекса навигации к до этого известным типам строк строки современных типов. Навигационная пользовательская аппаратура старого образца пропускает строки с современными типами и, как следствие, не применяет новшества, вводимые во время обновления комплекса навигации, однако при этом ее рабочие показатели остаются прежними.
Сообщения сигналов отечественной системы навигации с разделением по кодам обладают строковой структурой.
Что может привести к ухудшению точностных характеристик
На точностные характеристики определения пользователем собственного местонахождения, скоростных показателей движения и времени оказывают влияние огромное количество факторов, подразделяющихся на:
- погрешности системы, которые вносятся оборудованием космического комплекса. Погрешности, которые имеют связь с работой спутникового оборудования на борту и наземного управляющего комплекса глобальной спутниковой системы навигации, возникают чаще всего из-за ошибок частотно-временного и эфемеридного обеспечения;
- неточности, которые возникают на пути следования сигнала от корабля на орбите до пользователя. Погрешности возникают из-за отличия скоростных характеристик следования радиосигналов в земной атмосфере от скоростных характеристик их следования в безвоздушном пространстве, из-за того, что скорость зависит от физических параметров разных атмосферных слоев;
- погрешности, которые возникают в потребительских устройствах. Погрешности устройств делятся на систематическую погрешность замедления сигнала оборудования в пользовательском оборудовании и флуктуационные погрешности, вызванные шумовыми эффектами и движением пользователя.
Помимо этого, на точностные характеристики навигационно-временного определения оказывает огромное влияние то, как располагаются по отношению друг к другу спутниковые аппараты навигации и пользователь.
Количественным показателем погрешности определения координат и поправки значений, отображаемых часами, которая связана с нюансами расположения спутникового аппарата и пользователя в пространстве, является т. н. геометрический фактор (коэффициент геометрии). В материалах на английском языке фигурирует обозначение GDOP.
Коэффициент геометрии говорит о том, во сколько раз уменьшились точностные показатели измерений, и определяется такими величинами, как:
- геометрический фактор точностных характеристик расчета координат пользователя навигационной системы в пространстве. Обозначение в англоязычных материалах – PDOP;
- геометрический фактор точностных характеристик расчета координат пользователя навигационной системы в горизонтальной плоскости. Обозначение в англоязычных материалах – HDOP;
- геометрический фактор точностных характеристик расчета координат пользователя навигационной системы в вертикальной плоскости. Обозначение в англоязычных материалах – VDOP;
- геометрический фактор точностных характеристик расчета поправки показаний часов пользователя навигационной системы. Обозначение в англоязычных материалах – TDOP.
Как повысить точностные характеристики навигационного обеспечения
Действующие сегодня глобальные спутниковые комплексы навигации GPS и ГЛОНАСС обеспечивают удовлетворение потребности в навигационном обслуживании множества пользователей. Однако сейчас остаются нерешенными несколько задач, требующих высокоточного навигационного обеспечения. Среди них – взлет, подготовка к посадке, приземление летательных аппаратов, вождение судов вблизи берега, навигация вертолетов и автотранспорта и проч.
Стандартный способ повышения точностных характеристик навигации – применение дифференциального (относительного) режима определений.
Относительный режим предусматривает применение 1 либо нескольких основных устройств приема, расположенных в местах с определенными координатами, которые в одно время с устройством приема пользователя (нестационарным) принимают сигналы одних и тех же спутниковых аппаратов.
Повышение точностных характеристик навигационных определений происходит благодаря тому, что погрешности измерения навигационных показателей основного и пользовательского устройств приема не коррелируются. При определении разности рассчитываемых показателей происходит компенсация большинства этих погрешностей.
Относительный метод основывается на знании местоположения точки опоры – контрольно-корректирующего пункта либо комплекса опорных пунктов, относительно которых могут быть определены поправки к расчету псевдодальностей до спутниковых аппаратов навигации. Если данные поправки будут учтены в пользовательском оборудовании, точностные характеристики определения, в том числе, местоположения можно повысить во много раз.
Чтобы использовать относительный режим на больших территориях – к примеру, в РФ, Евросоюзе, Америке – корректирующие дифференциальные поправки отправляются с применением геостационарных спутниковых аппаратов. Системы, которые реализуют этот подход, называются широкозонными дифференциальными системами.
Все подробности о системах функциональных дополнений глобального спутникового комплекса навигации, предоставляющих пользователям расширенные корректирующие данные, можно найти во вкладке “Функциональные дополнения”.
Зачем нужна навигация в космосе
Слово космос является синонимом слова Вселенная. Часто космос разделяют несколько условно на ближний, который возможно исследовать в настоящее время при помощи искусственных спутников Земли, космических аппаратов, межпланетных станций и других средств, и дальний — все остальное, несоизмеримо большее. По сути дела, под ближним космосом понимается Солнечная система, а под дальним — необъятные просторы звезд и галактик.
Буквальный смысл слова «космонавтика», представляющего собой сочетание двух греческих слов — «плавание во Вселенной». В обычном употреблении это слово означает совокупность различных отраслей науки и техники, обеспечивающих исследование и освоение космического пространства и небесных тел с помощью космических летательных аппаратов — искусственных спутников, автоматических станций различного назначения, пилотируемых космических кораблей.
Космонавтика, или, как ее иногда называют, астронавтика, объединяет в себе полеты в космическое пространство, совокупность отраслей науки и техники, служащих для исследования и использования космического пространства в интересах нужд человечества с использованием различных космических средств. Началом космической эры человечества считается 4 октября 1957 г. — дата, когда в Советском Союзе был запущен первый искусственный спутник Земли.
Теория космических полетов, представлявших давнюю мечту человечества, превратилась в науку в результате основополагающих трудов великого русского ученого Константина Эдуардовича Циолковского. Им были изучены основные принципы баллистики ракет, предложена схема жидкостного ракетного двигателя, установлены закономерности, определяющие реактивную силу двигателя. Так же были предложены схемы космических кораблей и даны широко вошедшие сейчас в практику принципы конструирования ракет. В течение продолжительного времени, до того момента, когда идеи, формулы и чертежи энтузиастов и ученых стали в конструкторских бюро и в цехах заводов превращаться в объекты, изготовленные «в металле», теоретический фундамент космонавтики покоился на трех китах: 1) теории движения космических аппаратов; 2) ракетной технике; 3) совокупности астрономических знаний о Вселенной. Впоследствии в недрах космонавтики зародился широкий цикл новых научно-технических дисциплин, таких, как теория систем управления космическими объектами, космическая навигация, теория космических систем связи и передачи информации, космическая биология и медицина и т. д. Сейчас, когда нам трудно представить себе космонавтику без этих дисциплин, полезно вспомнить о том, что теоретические основы космонавтики закладывались К. Э. Циолковским в то время, когда производились лишь первые опыты над использованием радиоволн и радио не могло считаться средством связи в космосе.
В течение многих лет в качестве средства связи всерьез рассматривалась сигнализация с помощью лучей солнечного света, отражаемых в сторону Земли зеркалами, находящимися на борту межпланетного корабля. Сейчас, когда мы привыкли не удивляться ни прямому телевизионному репортажу с поверхности Луны, ни полученным по радио фотографиям, сделанным вблизи Юпитера или на поверхности Венеры, в это трудно поверить. Поэтому можно утверждать, что теория космической связи, несмотря на всю свою важность, не является все же главным звеном в цепи космических дисциплин. Таким главным звеном служит теория движения космических объектов. Именно ее можно считать теорией космических полетов. Специалисты, занимающиеся этой наукой, сами называют ее по-разному: прикладная небесная механика, небесная баллистика, космическая баллистика, космодинамика, механика космического полета, теория движения искусственных небесных тел. Все эти названия имеют один и тот же смысл, точно выражаемый последним термином. Космодинамика, таким образом, является частью небесной механики — науки, изучающей движение любых небесных тел, как естественных (звезды, Солнце, планеты, их спутники, кометы, метеорные тела, космическая пыль), так и искусственных (автоматические космические аппараты и пилотируемые корабли). Но есть нечто, выделяющее космодинамику из небесной механики. Родившаяся в лоне небесной механики космодинамика пользуется ее методами, но не умещается в ее традиционных рамках.
Существенное отличие прикладной небесной механики от классической заключается в том, что вторая не занимается и не может заниматься выбором орбит небесных тел, в то время как первая занимается отбором из огромного числа возможных траекторий достижения того или иного небесного тела определенной траектории, которая учитывает многочисленные, зачастую противоречивые требования. Главное требование — минимальность скорости, до которой разгоняется космический аппарат на начальном активном участке полета и соответственно минимальность массы ракеты-носителя или орбитального разгонного блока (при старте с околоземной орбиты). Это обеспечивает максимальную полезную нагрузку и, следовательно, наибольшую научную эффективность полета. Учитываются также требования простоты управления, условий радиосвязи (например, в момент захода станции за планету при ее облете), условий научных исследований (посадка на дневной или ночной стороне планеты) и т. п. Космодинамика предоставляет в распоряжение проектировщиков космической операции методы оптимального перехода с одной орбиты на другую, способы исправления траектории. В поле ее зрения находится неведомое классической небесной механике орбитальное маневрирование. Космодинамика представляет собой фундамент общей теории космического полета (подобно тому как аэродинамика представляет собой фундамент теории полета в атмосфере самолетов, вертолетов, дирижаблей и других летательных аппаратов). Эту свою роль космодинамика делит с ракетодинамикой — наукой о движении ракет. Обе науки, тесно переплетаясь, лежат в основе космической техники. Обе они являются разделами теоретической механики, которая сама представляет собой обособившийся раздел физики. Будучи точной наукой, космодинамика использует математические методы исследования и требует логически стройной системы изложения. Недаром основы небесной механики были разработаны после великих открытий Коперника, Галилея и Кеплера именно теми учеными, которые внесли величайший вклад в развитие математики и механики. Это были Ньютон, Эйлер, Клеро, Даламбер, Лагранж, Лаплас. И в настоящее время математика помогает решению задач небесной баллистики и в свою очередь получает толчок в своем развитии благодаря тем задачам, которые космодинамика перед ней ставит.
Классическая небесная механика была чисто теоретической наукой. Ее выводы находили неизменное подтверждение в данных астрономических наблюдений. Космодинамика привнесла в небесную механику эксперимент, и небесная механика впервые превратилась в экспериментальную науку, подобную в этом отношении, скажем, такому разделу механики, как аэродинамика. На смену поневоле пассивному характеру классической небесной механики пришел активный, наступательный дух небесной баллистики. Каждое новое достижение космонавтики — это вместе с тем свидетельство эффективности и точности методов космодинамики. Космодинамика делится на две части: теорию движения центра масс космического аппарата (теорию космических траекторий) и теорию движения космического аппарата относительно центра масс (теорию «вращательного движения»).
Ракетные двигатели
Основным и почти единственным средством передвижения в мировом пространстве является ракета, которая для этой цели была впервые предложена в 1903 г. К. Э. Циолковским. Законы ракетного движения представляют собой один из краеугольных камней теории космического полета.
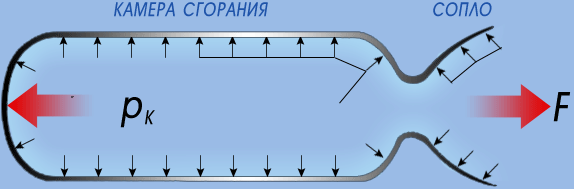
Космонавтика обладает большим арсеналом ракетных двигательных систем, основанных на использовании различных видов энергии. Но во всех случаях ракетный двигатель осуществляет одну и ту же задачу: он тем или иным способом выбрасывает из ракеты некоторую массу, запас которой (так называемое рабочее тело) находится внутри ракеты. На выбрасываемую массу со стороны ракеты действует некоторая сила, и согласно третьему закону механики Ньютона — закону равенства действия и противодействия — такая же сила, но противоположно направленная, действует со стороны выбрасываемой массы на ракету. Эта последняя сила, приводящая ракету в движение, называется силой тяги. Интуитивно ясно, что сила тяги должна быть тем больше, чем большая масса в единицу времени выбрасывается из ракеты и чем больше скорость, которую удается сообщить выбрасываемой массе.
Простейшая схема устройства ракеты:
На данном этапе развития науки и техники существуют ракетные двигатели, основанные на разных принципах действия.
Термохимические ракетные двигатели.
Принцип действия термохимических (или просто химических) двигателей не сложен: в результате химической реакции (как правило, реакции горения) выделяется большое количество тепла и нагретые до высокой температуры продукты реакции, стремительно расширяясь, с большой скоростью истечения выбрасываются из ракеты. Химические двигатели относятся к более широкому классу тепловых (теплообменных) двигателей, в которых истечение рабочего тела осуществляется в результате его расширения посредством нагревания. Для таких двигателей скорость истечения в основном зависит от температуры расширяющихся газов и от их среднего молекулярного веса: чем больше температура и чем меньше молекулярный вес, тем больше скорость истечения. По этому принципу работают жидкостные ракетные двигатели, ракетные двигатели твердого топлива, воздушно-реактивные двигатели.
Ядерные тепловые двигатели.
Принцип действия этих двигателей почти не отличается от принципа действия химических двигателей. Разница заключается в том, что рабочее тело нагревается не за счет своей собственной химической энергии, а за счет «постороннего» тепла, выделяющегося при внутриядерной реакции. По этому принципу проектировались пульсирующие ядерные тепловые двигатели, ядерные тепловые двигатели на термоядерном синтезе, на радиоактивном распаде изотопов. Однако опасность радиоактивного заражения атмосферы и заключение договора о прекращении ядерных испытаний в атмосфере, в космосе и под водой, привели к прекращению финансирования упомянутых проектов.
Тепловые двигатели с внешним источником энергии.
Принцип их действия основан на получении энергии извне. По этому принципу проектируют гелиотермический двигатель, источником энергии которому служит Солнце. Концентрируемые с помощью зеркал солнечные лучи используются для непосредственного нагрева рабочего тела.
Электрические ракетные двигатели.
Этот обширный класс двигателей объединяет различные типы двигателей, которые очень интенсивно разрабатываются в настоящее время. Разгон рабочего тела до определенной скорости истечения производится за счет электрической энергии. Энергия получается от атомной или солнечной электростанции, находящейся на борту космического корабля (в принципе даже от химической батареи). Схемы разрабатываемых электрических двигателей чрезвычайно разнообразны. Это и электротермические двигатели, электростатические (ионные) двигатели, электромагнитные (плазменные) двигатели, электрические двигатели с забором рабочего тела из верхних слоев атмосферы.
Космические ракеты
Современная космическая ракета представляет собой сложное сооружение, состоящее из сотен тысяч и миллионов деталей, каждая из которых играет предназначенную ей роль. Но с точки зрения механики разгона ракеты до необходимой скорости всю начальную массу ракеты можно разделить на две части: 1) масса рабочего тела и 2) конечная масса, остающаяся после выброса рабочего тела. Эту последнюю часто называют «сухой» массой, так как рабочее тело в большинстве случаев представляет собой жидкое топливо. «Сухая» масса (или, если угодно, масса «пустой», без рабочего тела, ракеты) состоит из массы конструкции и массы полезной нагрузки. Под конструкцией следует понимать не только несущую конструкцию ракеты, ее оболочку и т. п., но и двигательную систему со всеми ее агрегатами, систему управления, включающую органы управления, аппаратуру навигации и связи, и т. п.,- одним словом, все то, что обеспечивает нормальный полет ракеты. Полезная нагрузка состоит из научной аппаратуры, радиотелеметрической системы, корпуса выводимого на орбиту космического аппарата, экипажа и системы жизнеобеспечения космического корабля и т. п. Полезная нагрузка — это то, без чего ракета может совершить нормальный полет.
Набору скорости ракеты благоприятствует то, что по мере истечения рабочего тела масса ракеты уменьшается, благодаря чему при неизменной тяге непрерывно растет реактивное ускорение. Но, к сожалению, ракета состоит не из одного лишь рабочего тела. По мере истечения рабочего тела освободившиеся баки, лишние части оболочки и т. д. начинают обременять ракету мертвым грузом, затрудняя ее разгон. Целесообразно в некоторые моменты отделять эти части от ракеты. Построенная таким образом ракета называется составной. Часто составная ракета состоит из самостоятельных ракет- ступеней (благодаря этому из отдельных ступеней можно составлять различные ракетные комплексы), соединенных последовательно. Но возможно и параллельное соединение ступеней, бок о бок. Наконец, существуют проекты составных ракет, в которых последняя ступень входит внутрь предыдущей, та заключена внутри предшествующей и т. д.; при этом ступени имеют общий двигатель и уже не являются самостоятельными ракетами. Существенный недостаток последней схемы заключается в том, что после отделения отработавшей ступени резко возрастает реактивное ускорение, так как двигатель остался прежним, тяга поэтому не изменилась, а разгоняемая масса ракеты резко уменьшилась. Это затрудняет точность наведения ракеты и предъявляет повышенные требования к прочности конструкции. При последовательном же соединении ступеней вновь включаемая ступень обладает меньшей тягой и ускорение не изменяется резким скачком. Пока работает первая ступень, мы можем рассматривать остальные ступени вместе с истинной полезной нагрузкой в качестве полезной нагрузки первой ступени. После отделения первой ступени начинает работать вторая ступень, которая вместе с последующими ступенями и истинной полезной нагрузкой образует самостоятельную ракету («первую субракету»). Для второй ступени все последующие ступени вместе с истинным полезным грузом играют роль собственной полезной нагрузки и т. д. Каждая субракета добавляет к уже имеющейся скорости собственную идеальную скорость, и в результате конечная идеальная скорость многоступенчатой ракеты складывается из суммы идеальных скоростей отдельных субракет.
Ракета является весьма «затратным» транспортным средством. Ракеты-носители космических аппаратов «транспортируют», главным образом, топливо, необходимое для работы их двигателей и собственную конструкцию, состоящую в основном из топливных контейнеров и двигательной установки. На долю полезной нагрузки приходится лишь малая часть (1,5-2,0%) стартовой массы ракеты.
Составная ракета позволяет более рационально использовать ресурсы за счет того, что в полете ступень, выработавшая свое топливо, отделяется, и остальное топливо ракеты не тратится на ускорение конструкции отработавшей ступени, ставшей ненужной для продолжения полета.
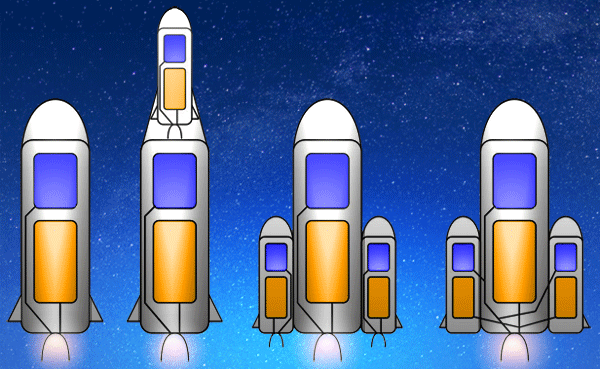
Варианты компоновки ракет. Слева направо:
- Одноступенчатая ракета.
- Двухступенчатая ракета с поперечным разделением.
- Двухступенчатая ракета с продольным разделением.
- Ракета с внешними топливными емкостями, отделяемыми после исчерпания топлива в них.
Конструктивно многоступенчатые ракеты выполняются c поперечным или продольным разделением ступеней.
При поперечном разделении ступени размещаются одна над другой и работают последовательно друг за другом, включаясь только после отделения предыдущей ступени. Такая схема дает возможность создавать системы, в принципе, с любым количеством ступеней. Недостаток ее заключается в том, что ресурсы последующих ступеней не могут быть использованы при работе предыдущей, являясь для нее пассивным грузом.
При продольном разделении первая ступень состоит из нескольких одинаковых ракет (на практике, от двух до восьми), располагающихся вокруг корпуса второй ступени симметрично, чтобы равнодействующая сил тяги двигателей первой ступени была направлена по оси симметрии второй, и работающих одновременно. Такая схема позволяет работать двигателю второй ступени одновременно с двигателями первой, увеличивая таким образом суммарную тягу, что особенно нужно во время работы первой ступени, когда масса ракеты максимальна. Но ракета с продольным разделением ступеней может быть только двухступенчатой.
Существует и комбинированная схема разделения — продольно-поперечная, позволяющая совместить преимущества обеих схем, при которой первая ступень разделяется со второй продольно, а разделение всех последующих ступеней происходит поперечно. Пример такого подхода — отечественный носитель «Союз».
Уникальную схему двухступенчатой ракеты с продольным разделением имеет космический корабль Спейс Шаттл, первая ступень которого состоит из двух боковых твердотопливных ускорителей, на второй ступени часть топлива содержится в баках орбитера (собственно многоразового корабля), а большая часть — в отделяемом внешнем топливном баке. Сначала двигательная установка орбитера расходует топливо из внешнего бака, а когда оно будет исчерпано, внешний бак сбрасывается и двигатели продолжают работу на том топливе, которое содержится в баках орбитера. Такая схема позволяет максимально использовать двигательную установку орбитера, которая работает на всем протяжении вывода корабля на орбиту.
При поперечном разделении ступени соединяются между собой специальными секциями — переходниками — несущими конструкциями цилиндрической или конической формы (в зависимости от соотношения диаметров ступеней), каждый из которых должен выдерживать суммарный вес всех последующих ступеней, помноженный на максимальное значение перегрузки, испытываемой ракетой на всех участках, на которых данный переходник входит в состав ракеты. При продольном разделении на корпусе второй ступени создаются силовые бандажи (передний и задний), к которым крепятся блоки первой ступени.
Элементы, соединяющие части составной ракеты, сообщают ей жесткость цельного корпуса, а при разделении ступеней должны практически мгновенно освобождать верхнюю ступень. Обычно соединение ступеней выполняется с помощью пироболтов. Пироболт — это крепежный болт, в стержне которого рядом с головкой создается полость, заполняемая бризантным взрывчатым веществом с электродетонатором. При подаче импульса тока на электродетонатор происходит взрыв, разрушающий стержень болта, в результате чего его головка отрывается. Количество взрывчатки в пироболте тщательно дозируется, чтобы, с одной стороны, гарантированно оторвать головку, а, с другой — не повредить ракету. При разделении ступеней на электродетонаторы всех пироболтов, соединяющих разделяемые части, одновременно подается импульс тока, и соединение освобождается.
Далее ступени должны быть разведены на безопасное расстояние друг от друга. (Запуск двигателя высшей ступени вблизи низшей может вызвать прогар ее топливной емкости и взрыв остатков топлива, который повредит верхнюю ступень, или дестабилизирует ее полет.) При разделении ступеней в атмосфере для их разведения может быть использована аэродинамическая сила встречного потока воздуха, а при разделении в пустоте иногда используются вспомогательные небольшие твердотопливные ракетные двигатели.
На жидкостных ракетах эти же двигатели служат и для того, чтобы «осадить» топливо в баках верхней ступени: при выключении двигателя низшей ступени ракета летит по инерции, в состоянии свободного падения, при этом жидкое топливо в баках находится во взвешенном состоянии, что может привести к сбою при запуске двигателя. Вспомогательные двигатели сообщают ступени небольшое ускорение, под действием которого топливо «оседает» на днища баков.
Увеличение числа ступеней дает положительный эффект только до определенного предела. Чем больше ступеней, тем больше суммарная масса переходников, а также двигателей, работающих лишь на одном участке полета, и, в какой-то момент, дальнейшее увеличение числа ступеней становится контрпродуктивным. В современной практике ракетостроения более четырех ступеней, как правило, не делается.
При выборе числа ступеней важное значение имеют также вопросы надежности. Пироболты и вспомогательные твердотопливные ракетные двигатели — элементы одноразового действия, проверить функционирование которых до старта ракеты невозможно. Между тем, отказ только одного пироболта может привести к аварийному завершению полета ракеты. Увеличение числа одноразовых элементов, не подлежащих проверке функционирования, снижает надежность всей ракеты в целом. Это также заставляет конструкторов воздерживаться от слишком большого количества ступеней.
Космические скорости
Чрезвычайно важно отметить, что скорость, развиваемая ракетой (а вместе с ней и всем космическим летательным аппаратом) на активном участке пути, т. е. на том сравнительно коротком участке, пока работает ракетный двигатель, должна быть достигнута очень и очень высокая.
Поместим мысленно нашу ракету в свободное пространство и включим ее двигатель. Двигатель создал тягу, ракета получила какое-то ускорение и начала набирать скорость, двигаясь по прямой линии (если сила тяги не меняет своего направления). Какую скорость приобретет ракета к моменту, когда ее масса уменьшится от начальной m0 до конечной величины mk? Если допустить, что скорость истечения w вещества из ракеты неизменна (это довольно точно соблюдается в современных ракетах), то ракета разовьет скорость v, выражающуюся формулой Циолковского, определяющая скорость, которую развивает летательный аппарат под воздействием тяги ракетного двигателя, неизменной по направлению, при отсутствии всех других сил:

где ln обозначает натуральный, а log – десятичный логарифмы
Скорость, вычисляемая по формуле Циолковского, характеризует энергетические ресурсы ракеты. Она называется идеальной. Мы видим, что идеальная скорость не зависит от секундного расхода массы рабочего тела, а зависит только от скорости истечения w и от числа z = m0/mk, называемого отношением масс или числом Циолковского.
Существует понятие так называемых космических скоростей: первой, второй и третьей. Первой космической скоростью называется такая скорость, при достижении которой тело (космический аппарат), запущенное с Земли, может стать ее спутником. Если не учитывать влияния атмосферы, то непосредственно над уровнем моря первая космическая скорость составляет 7,9 км/с и с увеличением расстояния от Земли уменьшается. На высоте 200 км от Земли она равна 7,78 км/с. Практически первая космическая скорость принимается равной 8 км/с.
Для того чтобы преодолеть притяжение Земли и превратиться, например, в спутник Солнца или достигнуть какой-нибудь другой планеты Солнечной системы, запускаемое с Земли тело (космический аппарат) должно достигнуть второй космической скорости, принимаемой равной 11,2 км/с.
Третьей космической скоростью у поверхности Земли телу (космическому аппарату) необходимо обладать в том случае, когда требуется, чтобы оно могло преодолеть притяжение Земли и Солнца и покинуть Солнечную систему. Третья космическая скорость принимается равной 16,7 км/с.
Космические скорости по своему значению огромны. Они в несколько десятков раз превышают скорость звука в воздухе. Только из этого ясно видно, какие сложные задачи стоят в области космонавтики.
Почему же космические скорости такие огромные и почему космические аппараты не падают на Землю? Действительно, странно: Солнце огромными силами тяготения удерживает около себя Землю и все другие планеты Солнечной системы, не дает им улететь в космическое пространство. Странно, казалось бы, то, что Земля около себя удерживает Луну. Между всеми телами действуют силы тяготения, но не падают планеты на Солнце потому, что находятся в движении, в этом-то и секрет.
Все падает вниз, на Землю: и капли дождя, и снежинки, и сорвавшийся с горы камень, и опрокинутая со стола чашка. А Луна? Она вращается вокруг Земли. Если бы не силы тяготения, она улетела бы по касательной к орбите, а если бы она вдруг остановилась, то упала бы на Землю. Луна, вследствие притяжения Земли, отклоняется от прямолинейного пути, все время как бы «падая» на Землю.
Движение Луны происходит по некоторой дуге, и пока действует гравитация, Луна на Землю не упадет. Так же и с Землей — если бы она остановилась, то упала бы на Солнце, но этого не произойдет по той же причине. Два вида движения — одно под действием силы тяготения, другое по инерции — складываются и в результате дают криволинейное движение.
Закон всемирного тяготения, удерживающий в равновесии Вселенную, открыл английский ученый Исаак Ньютон. Когда он опубликовал свое открытие, люди говорили, что он сошел с ума. Закон тяготения определяет не только движение Луны, Земли, но и всех небесных тел в Солнечной системе, а также искусственных спутников, орбитальных станций, межпланетных космических кораблей.
Законы Кеплера
Прежде чем рассматривать орбиты космических аппаратов, рассмотрим законы Кеплера, которые их описывают.
Иоганн Кеплер обладал чувством прекрасного. Всю свою сознательную жизнь он пытался доказать, что Солнечная система представляет собой некое мистическое произведение искусства. Сначала он пытался связать ее устройство с пятью правильными многогранниками классической древнегреческой геометрии. (Правильный многогранник — объемная фигура, все грани которой представляют собой равные между собой правильные многоугольники.) Во времена Кеплера было известно шесть планет, которые, как полагалось, помещались на вращающихся «хрустальных сферах». Кеплер утверждал, что эти сферы расположены таким образом, что между соседними сферами точно вписываются правильные многогранники. Между двумя внешними сферами — Сатурна и Юпитера — он поместил куб, вписанный во внешнюю сферу, в который, в свою очередь, вписана внутренняя сфера; между сферами Юпитера и Марса — тетраэдр (правильный четырехгранник) и т. д. Шесть сфер планет, пять вписанных между ними правильных многогранников — казалось бы, само совершенство?
Увы, сравнив свою модель с наблюдаемыми орбитами планет, Кеплер вынужден был признать, что реальное поведение небесных тел не вписывается в очерченные им стройные рамки. Единственным пережившим века результатом того юношеского порыва Кеплера стала модель Солнечной системы, собственноручно изготовленная ученым и преподнесенная в дар его патрону герцогу Фредерику фон Вюртембургу. В этом прекрасно исполненном металлическом артефакте все орбитальные сферы планет и вписанные в них правильные многогранники представляют собой не сообщающиеся между собой полые емкости, которые по праздникам предполагалось заполнять различными напитками для угощения гостей герцога.
Лишь переехав в Прагу и став ассистентом знаменитого датского астронома Тихо Браге, Кеплер натолкнулся на идеи, по-настоящему обессмертившие его имя в анналах науки. Тихо Браге всю жизнь собирал данные астрономических наблюдений и накопил огромные объемы сведений о движении планет. После его смерти они перешли в распоряжение Кеплера. Эти записи, между прочим, имели большую коммерческую ценность по тем временам, поскольку их можно было использовать для составления уточненных астрологических гороскопов (сегодня об этом разделе ранней астрономии ученые предпочитают умалчивать).
Обрабатывая результаты наблюдений Тихо Браге, Кеплер столкнулся с проблемой, которая и при наличии современных компьютеров могла бы показаться кому-то трудноразрешимой, а у Кеплера не было иного выбора, кроме как проводить все расчеты вручную. Конечно же, как и большинство астрономов его времени, Кеплер уже был знаком с гелиоцентрической системой Коперника и знал, что Земля вращается вокруг Солнца, о чем свидетельствует и вышеописанная модель Солнечной системы. Но как именно вращается Земля и другие планеты? Представим проблему следующим образом: вы находитесь на планете, которая, во-первых, вращается вокруг своей оси, а во-вторых, вращается вокруг Солнца по неизвестной вам орбите. Глядя в небо, мы видим другие планеты, которые также движутся по неизвестным нам орбитам. И задача — определить по данным наблюдений, сделанных на нашем вращающемся вокруг своей оси вокруг Солнца земном шаре, геометрию орбит и скорости движения других планет. Именно это, в конечном итоге, удалось сделать Кеплеру, после чего, на основе полученных результатов, он и вывел три своих закона!
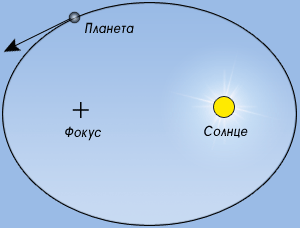
Первый закон описывает геометрию траекторий планетарных орбит: каждая планета Солнечной системы обращается по эллипсу, в одном из фокусов которого находится Солнце. Из школьного курса геометрии — эллипс представляет собой множество точек плоскости, сумма расстояний от которых до двух фиксированных точек — фокусов — равна константе. Или иначе — представьте себе сечение боковой поверхности конуса плоскостью под углом к его основанию, не проходящей через основание, — это тоже эллипс. Первый закон Кеплера как раз и утверждает, что орбиты планет представляют собой эллипсы, в одном из фокусов которых расположено Солнце. Эксцентриситеты (степень вытянутости) орбит и их удаления от Солнца в перигелии (ближайшей к Солнцу точке) и апогелии (самой удаленной точке) у всех планет разные, но все эллиптические орбиты роднит одно — Солнце расположено в одном из двух фокусов эллипса. Проанализировав данные наблюдений Тихо Браге, Кеплер сделал вывод, что планетарные орбиты представляют собой набор вложенных эллипсов. До него это просто не приходило в голову никому из астрономов.
Историческое значение первого закона Кеплера трудно переоценить. До него астрономы считали, что планеты движутся исключительно по круговым орбитам, а если это не укладывалось в рамки наблюдений — главное круговое движение дополнялось малыми кругами, которые планеты описывали вокруг точек основной круговой орбиты. Это было прежде всего философской позицией, своего рода непреложным фактом, не подлежащим сомнению и проверке. Философы утверждали, что небесное устройство, в отличие от земного, совершенно по своей гармонии, а поскольку совершеннейшими из геометрических фигур являются окружность и сфера, значит планеты движутся по окружности. Главное, что, получив доступ к обширным данным наблюдений Тихо Браге, Иоганн Кеплер сумел перешагнуть через этот философский предрассудок, увидев, что он не соответствует фактам — подобно тому как Коперник осмелился убрать Землю из центра мироздания, столкнувшись с противоречащими стойким геоцентрическим представлениям аргументами, которые также состояли в «неправильном поведении» планет на орбитах.
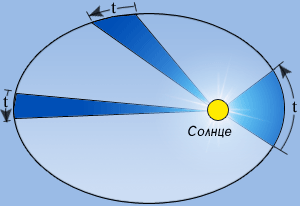
Второй закон описывает изменение скорости движения планет вокруг Солнца: каждая планета движется в плоскости, проходящей через центр Солнца, причем за равные промежутки времени радиус-вектор, соединяющий Солнце и планету, описывает равные площади. Чем дальше от Солнца уводит планету эллиптическая орбита, тем медленнее движение, чем ближе к Солнцу — тем быстрее движется планета. Теперь представьте пару отрезков, соединяющих два положения планеты на орбите с фокусом эллипса, в котором расположено Солнце. Вместе с сегментом эллипса, лежащим между ними, они образуют сектор, площадь которого как раз и является той самой «площадью, которую отсекает отрезок прямой». Именно о ней говорится во втором законе. Чем ближе планета к Солнцу, тем короче отрезки. Но в этом случае, чтобы за равное время сектор покрыл равную площадь, планета должна пройти большее расстояние по орбите, а значит скорость ее движения возрастает.
В первых двух законах речь идет о специфике орбитальных траекторий отдельно взятой планеты. Третий закон Кеплера позволяет сравнить орбиты планет между собой: квадраты периодов обращения планет вокруг Солнца относятся как кубы больших полуосей орбит планет. В нем говорится, что чем дальше от Солнца находится планета, тем больше времени занимает ее полный оборот при движении по орбите и тем дольше, соответственно, длится «год» на этой планете. Сегодня мы знаем, что это обусловлено двумя факторами. Во-первых, чем дальше планета находится от Солнца, тем длиннее периметр ее орбиты. Во-вторых, с ростом расстояния от Солнца снижается и линейная скорость движения планеты.
В своих законах Кеплер просто констатировал факты, изучив и обобщив результаты наблюдений. Если бы вы спросили его, чем обусловлена эллиптичность орбит или равенство площадей секторов, он бы вам не ответил. Это просто следовало из проведенного им анализа. Если бы вы спросили его об орбитальном движении планет в других звездных системах, он также не нашел бы, что вам ответить. Ему бы пришлось начинать все сначала — накапливать данные наблюдений, затем анализировать их и стараться выявить закономерности. То есть у него просто не было бы оснований полагать, что другая планетная система подчиняется тем же законам, что и Солнечная система.
Один из величайших триумфов классической механики Ньютона как раз и заключается в том, что она дает фундаментальное обоснование законам Кеплера и утверждает их универсальность. Оказывается, законы Кеплера можно вывести из законов механики Ньютона, закона всемирного тяготения Ньютона и закона сохранения момента импульса путем строгих математических выкладок. А раз так, мы можем быть уверены, что законы Кеплера в равной мере применимы к любой планетной системе в любой точке Вселенной. Астрономы, ищущие в мировом пространстве новые планетные системы (а открыто их уже довольно много), раз за разом, как само собой разумеющееся, применяют уравнения Кеплера для расчета параметров орбит далеких планет, хотя и не могут наблюдать их непосредственно.
Третий закон Кеплера играл и играет важную роль в современной космологии. Наблюдая за далекими галактиками, астрофизики регистрируют слабые сигналы, испускаемые атомами водорода, обращающимися по очень удаленным от галактического центра орбитам — гораздо дальше, чем обычно находятся звезды. По эффекту Доплера в спектре этого излучения ученые определяют скорости вращения водородной периферии галактического диска, а по ним — и угловые скорости галактик в целом. Труды ученого, твердо поставившего нас на путь правильного понимания устройства нашей Солнечной системы, и сегодня, спустя века после его смерти, играют столь важную роль в изучении строения необъятной Вселенной.
Орбиты
Большое значение имеет расчет траекторий полета космических аппаратов, в котором должна преследоваться основная цель — максимальная экономия энергии. При расчете траектории полета космического аппарата необходимо определять наиболее выгодное время и по возможности место старта, учитывать аэродинамические эффекты, возникающие в результате взаимодействия аппарата с атмосферой Земли при старте и финише, и многое другое.
Многие современные космические аппараты, особенно с экипажем, имеют относительно малые бортовые ракетные двигатели, главное назначение которых — необходимая коррекция орбиты и осуществление торможения при посадке. При расчете траектории полета должны учитываться ее изменения, связанные с корректировкой. Большая часть траектории (собственно, вся траектория, кроме активной ее части и периодов корректировки) осуществляется с выключенными двигателями, но, конечно, под воздействием гравитационных полей небесных тел.
Траектория движения космического аппарата называется орбитой. Во время свободного полета космического аппарата, когда его бортовые реактивные двигатели выключены, движение происходит под воздействием гравитационных сил и по инерции, причем главной силой является притяжение Земли.
Если считать Землю строго сферической, а действие гравитационного поля Земли — единственной силой, то движение космического аппарата подчиняется известным законам Кеплера: оно происходит в неподвижной (в абсолютном пространстве) плоскости, проходящей через центр Земли, — плоскости орбиты; орбита имеет форму эллипса или окружности (частный случай эллипса).
Орбиты характеризуются рядом параметров — система величин, определяющих ориентацию орбиты небесного тела в пространстве, ее размеры и форму, а также положение на орбите небесного тела в некоторый фиксированный момент. Невозмущенную орбиту, по которой движение тела происходит в соответствии с законами Кеплера, определяют:
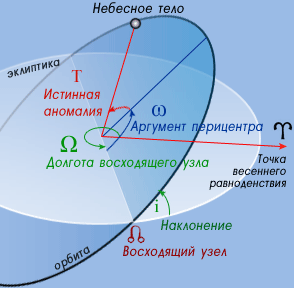
- Наклонение орбиты (i) к плоскости отсчета; может иметь значения от 0° до 180°. Наклонение меньше 90°, если для наблюдателя, находящегося в северном полюсе эклиптики или в северном полюсе мира, тело представляется движущимся против часовой стрелки, и больше 90°, если тело движется в противоположном направлении. В применении к Солнечной системе, за плоскость отсчета обычно выбирают плоскость орбиты Земли (плоскость эклиптики), для искусственных спутников Земли за плоскость отсчета обычно выбирают плоскость экватора Земли, для спутников других планет Солнечной системы за плоскость отсчета обычно выбирают плоскость экватора соответствующей планеты.
- Долгота восходящего узла (Ω) — один из основных элементов орбиты, используемых для математического описания формы орбиты и ее ориентации в пространстве. Определяет точку, в которой орбита пересекает основную плоскость в направлении с юга на север. Для тел, обращающихся вокруг Солнца, основная плоскость — эклиптика, а нулевая точка — Первая точка Овна (точка весеннего равноденствия).
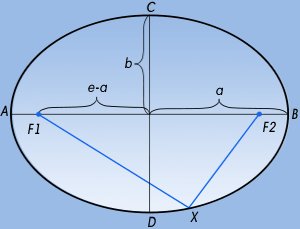
- Большая полуось (а) — это половина главной оси эллипса. В астрономии характеризует среднее расстояние небесного тела от фокуса.
- Эксцентриситет — числовая характеристика конического сечения. Эксцентриситет инвариантен относительно движений плоскости и преобразований подобия и характеризует «сжатость» орбиты.
- Аргумент перицентра — определяется как угол между направлениями из притягивающего центра на восходящий узел орбиты и на перицентр (ближайшую к притягивающему центру точку орбиты спутника), или угол между линией узлов и линией апсид. Отсчитывается из притягивающего центра в направлении движения спутника, обычно выбирается в пределах 0°-360°. Для определения восходящего и нисходящего узла выбирают некоторую (так называемую базовую) плоскость, содержащую притягивающий центр. В качестве базовой обычно используют плоскость эклиптики (движение планет, комет, астероидов вокруг Солнца), плоскость экватора планеты (движение спутников вокруг планеты) и т. д.
- Средняя аномалия для тела, движущегося по невозмущенной орбите — произведение его среднего движения и интервала времени после прохождения перицентра. Таким образом, средняя аномалия есть угловое расстояние от перицентра гипотетического тела, движущегося с постоянной угловой скоростью, равной среднему движению.
Существуют различные типы орбит – экваториальные (наклонение «i» = 0°), полярные (наклонение «i» = 90°), солнечно-синхронные орбиты (параметры орбиты таковы, что спутник проходит над любой точкой земной поверхности приблизительно в одно и то же местное солнечное время), низкоорбитальные (высоты от 160 км до 2000 км), среднеорбитальные (высоты от 2000 км до 35786 км), геостационарные (высота 35786 км), высокоорбитальные (высоты более 35786 км).
Hayabusa2. Зачем нужна оптическая система навигации


![]()
0 👁 1 542

20 мая 2018 года, Hayabusa2 был примерно в 287 миллионов км от Земли (см. рисунок 1) и около 40 000 км от астероида Ryugu (Рисунок 2).

Рис.1
А также около 40 000 км от Ryugu (Рисунок 2)

рис.2
Точный размер Рюгу в настоящее время неизвестен, но диаметр оценивается примерно в 900 м.
Это означает, что необходимо было достичь цели диаметром в 900 м с расстояния около 300 млн км, путешествуя от Земли. Такая точность требует оптической навигации. (Для сравнения, объект диаметром 900 м с расстояния 300 млн км-это словно мишень 6 см с расстоянии 20 тысяч километров!) Это эквивалентно прицеливанию в 6 см цель в Бразилии из Японии.) Орбита планетарного исследователя, такого как Hayabusa2, обычно оценивается путем связи с космическим аппаратом с помощью радиоволн. Техническим термином для этого метода является RARR: Range и Range Rate. “Range” – расстояние от Земли до космического аппарата и рассчитывается путем измерения времени распространения радиоволн, посылаемых с Земли на космический аппарат и обратно. “Range rate” – это измерение скорости космического аппарата вдоль линии прямой видимости: вдоль направления к космическому аппарату при наблюдении с Земли и рассчитывается по изменению частоты передаваемых и принимаемых радиоволн. Этот эффект широко известен как ” эффект Доплера “. Для сравнения : Когда автомобиль с включенной сиреной , такой как скорая помощь проезжает мимо вас , то по мере приближения машины звуковые волны от сирены собираются вместе, что увеличивает частоту волны и поднимает высоту тона. Когда скорая помощь удаляется от вас , эти звуковые волны растягиваются и их частота уменьшается, понижая высоту тона. Измерение этих частотных изменений позволит вам оценить скорость скорой помощи. Точно так же изменение частоты радиоволн от Hayabusa2 позволяет измерять скорость космического аппарата. Метод RARR может измерять положение космического аппарата на расстоянии от 300 миллионов километров до 300 километров. Но этого недостаточно. Для Hayabusa2 мы можем использовать метод оценки орбиты, называемый “Delta Differential One-way Range” (DDOR), в дополнение к RARR. DDOR может упоминаться как “relative VLBI”, где VLBI (Very Long Baseline Interferometry) – радиоинтерферометрия со сверхдлинными базами (РСДБ) РСДБ- вид интерферометрии, используемый в радиоастрономии, при котором приёмные элементы интерферометра (телескопы) располагаются не ближе, чем на континентальных расстояниях друг от друга. При этом управление элементами РСДБ интерферометра производится независимо, без непосредственной коммутационной линии связи, в отличие от обычного радиоинтерферометра. Запись данных осуществляется на носители информации с последующей корреляционной обработкой на специализированном вычислительном оборудовании— корреляторе. В идеале разница во времени будет зависеть только от расстояния между наземными станциями. Однако задержки могут также возникать из-за изменений в атмосфере Земли. Чтобы компенсировать это, наблюдаются также очень удаленные радиоизлучающие небесные объекты, известные как “квазары“. Любое искажение из-за атмосферы и ионосферы (верхняя часть атмосферы Земли) может быть вычтено из сигнала космического аппарата, чтобы получить истинное расстояние зонда. DDOR позволяет измерять положение Hayabusa2 на 300 млн. км с точностью до нескольких километров. В мае 2018 года положение Рюгу было оценено в пределах 220 км. Это означает, что даже если положение Hayabusa2 может быть оценено в пределах нескольких километров, все равно не будет возможно прибыть к Ryugu. Вот почему мы должны использовать оптическую навигацию. Чтобы получить направление, Ryugu фотографируется с помощью камеры на борту Hayabusa2, создавая изображение, содержащее как астероид, так и фоновые звезды. Положение фоновых звезд точно известно, что позволяет измерить направление на Рюгу. Оптическая навигация использовалась, когда Ryugu был отображен с помощью Звездного трекера (датчика), инструмента, обычно используемого для оценки ориентации космического корабля. Звёздный датчик (star tracker) — прибор в составе космического аппарата, предназначенный для определения ориентации. Является чувствительным элементом системы ориентации космического аппарата.  Схематическая диаграмма показана на рисунке 3. Синий овал показывает исходный регион до оптической навигации, где Рюгу возможно может находиться.
Схематическая диаграмма показана на рисунке 3. Синий овал показывает исходный регион до оптической навигации, где Рюгу возможно может находиться.  Дорогие друзья! Желаете всегда быть в курсе последних событий во Вселенной? Подпишитесь на рассылку оповещений о новых статьях, нажав на кнопку с колокольчиком в правом нижнем углу экрана ➤ ➤ ➤
Дорогие друзья! Желаете всегда быть в курсе последних событий во Вселенной? Подпишитесь на рассылку оповещений о новых статьях, нажав на кнопку с колокольчиком в правом нижнем углу экрана ➤ ➤ ➤
Добавить комментарий Отменить ответ
Для отправки комментария вам необходимо авторизоваться.