Слободянюк А.И. Физика 10/3.6
§3. Криволинейное движение. Плоскопараллельное движение твердого тела
3.6 Плоскопараллельное движение
Движение твердого тела называется плоскопараллельным, если траектории движения всех его точек являются плоскими кривыми, лежащими в параллельных плоскостях.
Плоскопараллельное движение твердого тела можно представить как суперпозицию поступательного движения и вращения вокруг оси, направление которой не изменяется. Наглядными примерами такого движения являются качение колеса, движение книги без отрыва от стола и т.д.
Для описания положения абсолютно твердого тела при плоскопараллельном движении необходимо задать две декартовые координаты какой-либо точки тела [1] и угол его поворота, то есть плоскопараллельное движение обладает тремя степенями свободы.
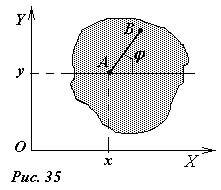
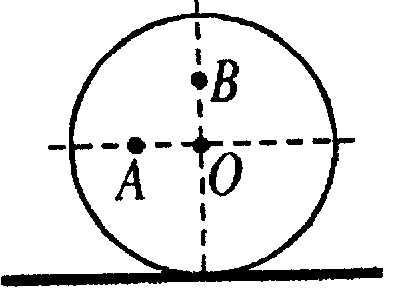
Выберем внутри тела две точки A, B; зададим координаты xA, yA точки A и угол φ, который образует отрезок AB с направлением оси X. Три числа xA, yA и φ однозначно определяют положение тела на плоскости, следовательно, являются его координатами. Зная эти координаты, можно определить положение в пространстве любой другой точки твердого тела путем геометрических построений.
Покажем теперь, как можно найти скорость любой точки твердого тела при плоскопараллельном движении (рис. 36).
Разложим движение на две составляющих — поступательное движение, скорость которого обозначим \(~\vec V\) , и вращение вокруг оси, проходящей через точку A, с угловой скоростью \(~\omega = \frac\) . Тогда скорость любой другой точки тела (например, B) является векторной суммой скоростей поступательного и вращательного движений —
\(~\vec V_B = \vec V + \vec V_\) , (1)
причем вектор скорости вращательного движения направлен перпендикулярно отрезку AB и равен по абсолютной величине VBP = ωr, где r расстояние от точки B до оси вращения.
Рассмотрим катящееся без проскальзывания колесо радиуса R (рис. 37).

Пусть его центр движется со скоростью \(~\vec V\). Найдем скорости некоторых других точек колеса. Для этого представим движение колеса как сумму поступательного движения его центра и вращения вокруг его оси. Так как движение происходит без проскальзывания, то угловая скорость вращения определяется формулой \(~\omega = \frac<\upsilon>\). Для точек, находящихся на ободе колеса линейная скорость вращательного движения равна по модулю скорости поступательного движения, так как для них расстояние до оси вращения равно радиусу колеса, поэтому \(~V_ = \omega r = \frac R = V\) . Однако, направление этой скорости различно для разных точек. Так, для точки A скорость вращательного движения направлена горизонтально, также как и скорость поступательного движения. Поэтому суммарная скорость точки A равна 2V и направлена горизонтально. Скорость вращательного движения точки B направлена вертикально вверх, поэтому ее полная скорость направлена под углом 45° к горизонту, а ее модуль \(~V_B = V \sqrt\) . Очень интересна точка касания с поверхностью C : скорость ее вращательного движения направлена горизонтально в сторону противоположную скорости поступательного движения, поэтому ее полная скорость равна нулю.
Так как разложение движения на составляющие не является однозначным, можно теперь представить качение колеса как сумму движения точки C и вращения вокруг оси, проходящей через эту точку. Мы показали, что скорость точки C равна нулю, поэтому появляется возможность рассматривать движение колеса как чистый поворот вокруг точки C. Правда, это возможно в течение только бесконечно малого промежутка времени, потому, что в следующий момент точкой касания будет другая точка колеса. Множество точек твердого тела, скорости которых в данный момент равны нулю, образуют мгновенную ось вращения тела. Такая ось существует при любом движении твердого тела. Правда положение этой оси постоянно изменяется, поэтому для вычисления координат точек такое представление движения не дает особых преимуществ. Но для вычисления скоростей точек, рассматривать плоскопараллельное движение как чистый поворот очень удобно.
Легко доказать, что угол поворота тела не зависит от того, относительно какой оси мы его рассматриваем, следовательно, и угловая скорость не зависит от оси. С этой точки зрения, скорость любой точки колеса определяется формулой V = ωr’ , где r’ — расстояние от данной точки до мгновенной оси вращения.
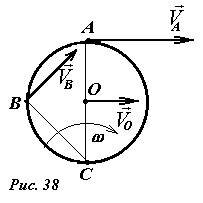
Рассмотренная задача об определении скоростей точек катящегося колеса может быть легко решена, если рассматривать его движение как поворот вокруг точки C (рис. 38): точка A находится на расстоянии 2R от мгновенной оси вращения, поэтому ее скорость равна VA = 2Rω = 2V; точка B находится на расстоянии \(~R \sqrt\) от оси, ее скорость \(~V \sqrt\). Направления векторов скоростей также совпадают с полученными ранее.
Таким образом, мы имеем два примерно одинаковых по сложности способа описания движения твердого тела: первый — суперпозиция поступательного и вращательного движений: второй — поворот вокруг мгновенной оси.
Примечания
- ↑ С точки зрения кинематического описания выбор этой точки произволен — только следует стремиться к тому, чтобы траектория этой точки была попроще. Далее мы укажем как можно легко найти такую точку.
Качение колеса как суперпозиция поступательного и вращательного движений
Плоское движение — это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями ; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
| Рис. 1.9. |
Обратимся к классическому простому примеру плоского движения — качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами .
| Рис. 1.10. |
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси и вращательного с угловой скоростью где — радиус колеса. Ясно, что в этом случае
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис. 1.11). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 1.11а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис. 1.11б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
| Рис. 1.11. |
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
В соответствии со сказанным скорость любой точки А тела (рис. 1.12) геометрически складывается из скорости какой-либо другой точки O, принятой за полюс, и скорости вращательного движения вокруг этого полюса. Напомним, что система координат XYZ на рис. 1.12 — неподвижная (лабораторная); начало системы x0y0z0 помещено в некоторую точку О тела (полюс), а сама система x0y0z0 движется относительно XYZ поступательно, причем так, что оси Oy0 и Oz0 остаются в плоскости рисунка. Рассматриваемая точка А тела также движется в плоскости рисунка (плоское движение!).
| Рис. 1.12. |
Радиус-вектор точки А
Скорость точки А
Из (1.16) можно сделать вывод, что в любой момент времени должна существовать такая точка M, скорость которой в лабораторной системе XYZ равна нулю — для этой точки
(рис. 1.13). Заметим, что эта точка не обязательно должна принадлежать телу, то есть может находиться и вне его. Таким образом, плоское движение твердого тела в данный момент времени можно представить как чистое вращение вокруг оси, проходящей через точку M — такая ось называется обычно мгновенной осью вращения. В частности, для колеса, катящегося по плоскости без проскальзывания (рис. 1.10), мгновенная ось вращения проходит через точку М соприкосновения колеса с плоскостью.
| Рис. 1.13. |
Существенно, что в разные моменты времени мгновенная ось вращения проходит через разные точки твердого тела и через разные точки лабораторной системы XYZ, сохраняя, конечно, свою ориентацию в пространстве.
Для того, чтобы определить положение мгновенной оси вращения, необходимо знать скорости каких-либо двух точек твердого тела. Так, на рис. 1.14 показано положение мгновенной оси вращения (точка М) для цилиндра, зажатого между двумя параллельными рейками, которые движутся в одну и ту же сторону с разными скоростями и
| Рис. 1.14. |
В ситуации, изображенной на рис. 1.15, стержень AB опирается на точку С и движется в плоскости чертежа так, что его конец B все время находится на полуокружности CBD При этом мгновенная ось вращения стержня (точка М) находится на верхней полуокружности CMD и при движении точки B вправо перемещается по дуге этой полуокружности влево.
| Рис. 1.15. |
В случае, показанном на рис. 1.16, стержень, опирающийся одним из своих концов на гладкую горизонтальную плоскость, начинает падать из вертикального положения. При этом центр масс стержня опускается, оставаясь на одной и той же вертикали. Мгновенная ось вращения (точка М) перемещается по дуге окружности радиуса ( — длина стержня).
| Рис. 1.16. |
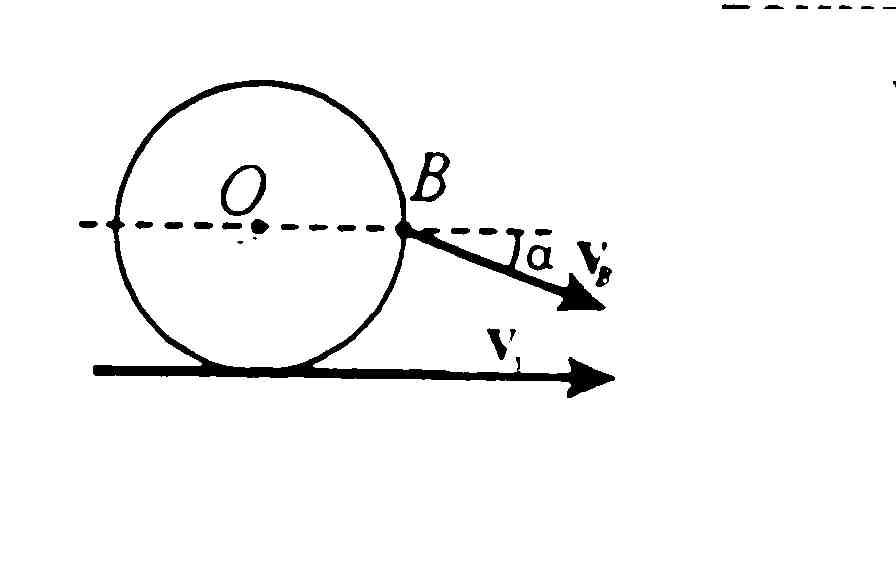
Зная угловую скорость и положение мгновенной оси вращения, можно легко определить скорость любой точки тела при его плоском движении. Так, в случае колеса, катящегося по плоскости со скоростью без проскальзывания (рис. 1.17), скорость точки В
вектор перпендикулярен отрезку в МВ, соединяющему точку В с точкой М, через которую проходит мгновенная ось вращения. Естественно, можно представить и как геометрическую сумму двух скоростей: — скорости поступательного движения оси колеса и — скорости вращательного движения вокруг этой оси, причем (рис. 1.17).
| Рис. 1.17. |
Рис. 1.18 иллюстрирует распределение скоростей на вертикальном диаметре колеса железнодорожного вагона. Мгновенная ось вращения проходит через точку М соприкосновения колеса с рельсом. Хорошо видно, что линейная скорость точки на краю реборды направлена в сторону, противоположную движению вагона.
| Рис. 1.18. |
Определим теперь ускорения точек тела при плоском движении. Дифференцируя выражением (1.16) по времени, получим для ускорения точки А
Это ускорение складывается из трех частот (рис. 1.19): ускорения точки O, принятой за полюс, тангенциального ускорения
и нормального ускорения
(скалярное произведение равно нулю, так как ).
| Рис. 1.19. |
Таким образом, ускорение любой точки А тела при плоском движении равно геометрической сумме ускорения точки, принятой за полюс, и ускорения точк, принятой за полюс, и ускорения точки A за счет ее вращения вокруг этого полюса. Отсюда, в частности, следует, что ускорение любой точки колеса, катящегося без проскальзывания по плоскости с постоянной скоростью , направлено к центру колеса и равно где — расстояние рассматриваемой точки до центра колеса. В этом примере в качестве полюса удобно выбрать центр колеса О, тогда и остается только
Замечание. По аналогии с мгновенной осью вращения можно ввести мгновенную ось, ускорения всех точек которой в данный момент времени равны нулю. При этом следует иметь в виду, что эта ось, вообще говоря, не совпадает с мгновенной осью вращения. Так, в примере с колесом, катящимся по плоскости с постоянной скоростью, она проходит через центр колеса.
| Публикации с ключевыми словами: механика — твердое тело — углы Эйлера Публикации со словами: механика — твердое тело — углы Эйлера |
|
| См. также: | |
§12. Сложение поступательного и вращательного движений. Плоское движение. Мгновенная ось вращения
1. Дополните предложения, вставляя пропущенные слова.
Движение твёрдого тела называют плоским, если ___________________________________ _____________________________________
Любое плоское движение твёрдого тела в каждый момент времени можно рассматривать как суперпозицию ______________________________________________
Угловая скорость вращения твёрдого тела ____________________ от разбиения его плоского движения на поступательное и вращательное.
Скорость поступательного движения твёрдого тела ____________________от разбиения его плоского движения на поступательное и вращательное.
Плоское движение твёрдого тела в каждый момент времени можно представить как _________________________________________, которое совершается вокруг ___________________________оси.
2. Два автомобиля движутся по прямолинейной дороге. При этом модуль скорости центра колеса у первого автомобиля меньше, а у второго автомобиля — больше модуля скорости верхней точки этого же колеса, обусловленной его вращением. Какой из автомобилей будет замедляться, а какой — ускоряться? Ответ поясните.
3. Есть ли проскальзывание между колёсами автомобиля и дорожным покрытием, если скорость автомобиля 72 км/ч, а колёса вращаются с частотой 10 об/с? Радиус колеса равен 30 см. Каким при этом будет движение автомобиля?
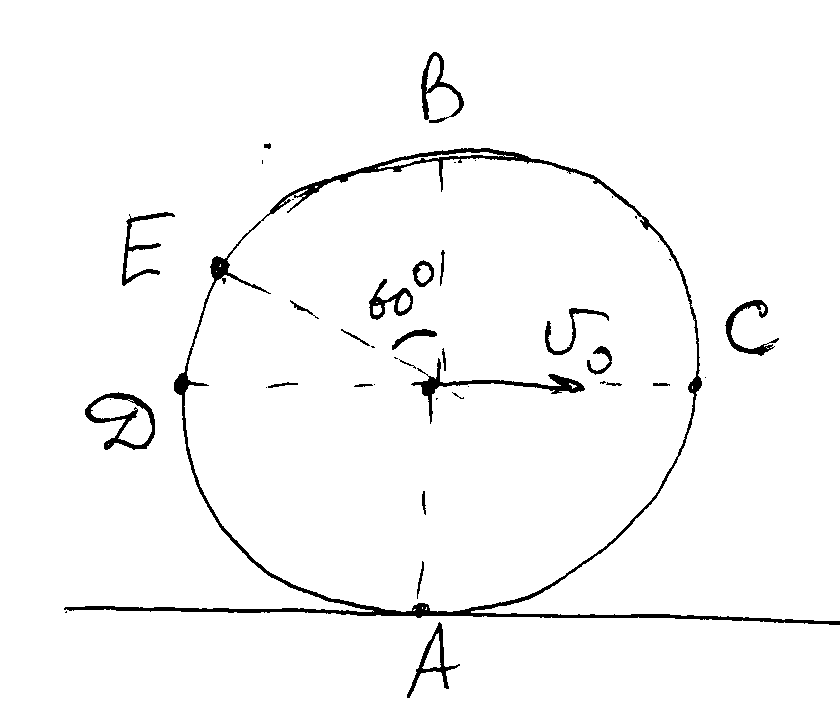
4. Цилиндрическая бочка катится по Земле без проскальзывания. Скорость её центра равна по модулю v0 = 2 м/с. Радиус бочки R = 0,5 м. Определите модули скоростей её точек А, В, С, D и Е ( рис. 19). Изобразите эти скорости (направление и модуль) на рисунке.
5. Колесо катится без проскальзывания по Земле, вращаясь с угловой скоростью = 4 рад/с. Радиус колеса R = 20 см. Определите модули скоростей точек А, В, С и D ( рис. 20). Изобразите эти скорости на рисунке.

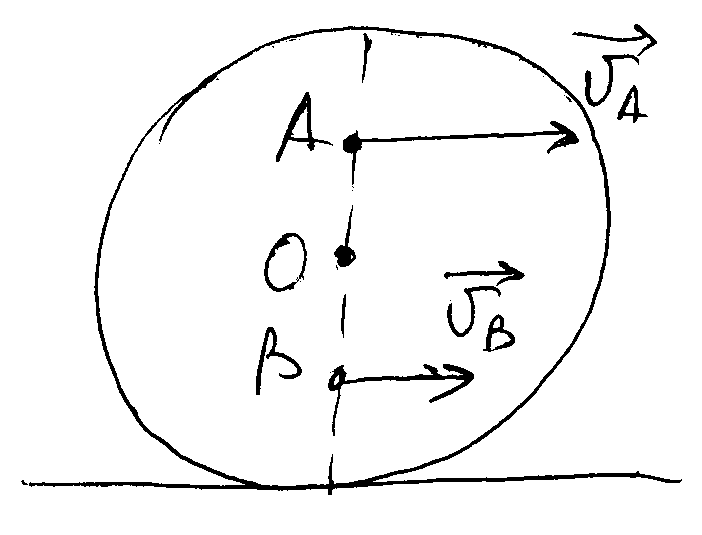
6. Диск катится без проскальзывания по горизонтальной поверхности. Скорости точек А и В, находящихся на одинаковом расстоянии от центра диска на его вертикальном диаметре, равны, соответственно, 10 м/с и 8 м/с (рис. 21). Радиус диска равен 10 см. Определите угловую скорость вращения диска и скорость движения его центра.
7. Автомобиль едет по горизонтальной дороге без проскальзывания со скоростью, модуль которой равен v. В некоторый момент отрывается маленький камушек, застрявший в покрышке. На какую максимальную высоту над дорогой может подняться камушек, если точка отрыва расположена на высоте h < R от Земли, где R — радиус колеса.
8. Стержень, поперечное сечение которого показано на рис. 22, катится по горизонтальной плоскости без проскальзывания. Определите отношение модулей скоростей точек А и В, если ОА = ОВ и в n раз меньше радиуса стержня.
9*. По ленте транспортёра (рис. 23), движущейся горизонтально со скоростью, модуль которой v = 1 м/c, в направлении её движения катится без проскальзывания колесо. Определите модуль u скорости центра колеса относительно Земли, если скорость точки В, находящейся на ободе колеса на его горизонтальном диаметре, относительно поверхности Земли образует с горизонтом угол = 30.
10*. Цилиндрический каток радиуса R помещён между двумя параллельными рейками, которые движутся в одну сторону со скоростями, модули которых равны v1 и v2. Определите угловую скорость катка и скорость движения его центра при отсутствии проскальзывания.
11*. Кривошип ОА (рис. 24) вращается с угловой скоростью 2,5 с -1 , приводя в движение колесо радиуса r = 5 см, которое катится по неподвижному колесу радиуса R = 15 см. Определить скорость точки В.
6.Плоское движение твердого тела.
Плоское движение — это такое движение твердого тела, при котором траектории всех его точек лежат в параллельных плоскостях. Если в теле провести некоторую прямую O1O2, перпендикулярную этим плоскостям (рис. 1.9), то все точки этой прямой будут двигаться по одинаковым траекториям с одинаковыми скоростями и ускорениями; сама прямая будет, естественно, сохранять свою ориентацию в пространстве. Таким образом, при плоском, или, как его иногда называют, плоско-параллельном, движении твердого тела достаточно рассмотреть движение одного из сечений тела.
Обратимся к классическому простому примеру плоского движения — качению цилиндра по плоскости без проскальзывания. Рассматривая одно из сечений цилиндра плоскостью, перпендикулярной его оси, мы придем к известное задаче о катящемся колесе (рис. 1.10). Центр колеса движется прямолинейно, траектории других точек представляют собой кривые, называемые циклоидами.
При отсутствии проскальзывания мгновенная скорость самой нижней точки колеса (точки M) равна нулю. Это позволяет рассматривать качение колеса как суперпозицию двух движений: поступательного со скоростью оси и вращательного с угловой скоростью где — радиус колеса. Ясно, что в этом случае
Попробуем обобщить этот прием на произвольное плоское движение.
Выделим отрезок АB в рассматриваемом сечении твердого тела (рис. 1.11). Перевод сечения из положения 1 в положение 2 можно рассматривать как суперпозицию двух движений: поступательного из 1 в 1′ и вращательного из 1′ в 2 вокруг точки A’, называемой обычно полюсом (рис. 1.11а). Существенно, что в качестве полюса можно выбрать любую точку, принадлежащую сечению или даже лежащую в плоскости сечение вне его. На рис. 1.11б, к примеру, в качестве полюса выбрана точка В. Обратите внимание: длина пути при поступательном перемещении изменилась (в данном случае увеличилась), но угол поворота остался прежним!
Приближая конечное положение тела к начальному (сокращая рассматриваемый промежуток времени), приходим к выводу: плоское движение твердого тела в любой момент времени можно представить как суперпозицию поступательного движения со скоростью некоторой точки, выбранной в качестве полюса, и вращения вокруг оси, проходящей через полюс. В реальной ситуации оба эти движения, естественно, происходят одновременно. Существенно, что разложение на поступательное и вращательное движения оказывается неоднозначным, причем в зависимости от выбора полюса скорость поступательного движения будет изменяться, а угловая скорость вращения останется неизменной.
7.Преобразование скорости и ускорения при переходе к другой системе отсчета.
Преобразова́ния Галиле́я — в классической механике (механике Ньютона) преобразования координат и времени при переходе от одной инерциальной системы отсчета (ИСО) к другой [1] . Термин был предложен Филиппом Франком в 1909 году. [2] Преобразования Галилея подразумевают одинаковость времени во всех системах отсчета («абсолютное время» [3] ) и выполнение принципа относительности (принцип относительности Галилея (см. ниже)).
Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для скоростей, малых по сравнению со скоростью света в пустоте. Для скоростей вплоть до порядка скоростей движения планет в Солнечной системе (и даже бо́льших), преобразования Галилея приближенно верны с очень большой точностью.
Вид преобразований при коллинеарных осях [4]
Если ИСО S движется относительно ИСО S’ с постоянной скоростью  вдоль оси
вдоль оси  , а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:
, а начала координат совпадают в начальный момент времени в обеих системах, то преобразования Галилея имеют вид:




или, используя векторные обозначения,

(последняя формула остается верной для любого направления осей координат).
Как видим, это просто формулы для сдвига начала координат, линейно зависящего от времени (подразумеваемого одинаковым для всех систем отсчета).
Из этих преобразований следуют соотношения между скоростями движения точки и её ускорениями в обеих системах отсчета:



Преобразования Галилея являются предельным (частным) случаем преобразований Лоренца для малых скоростей (много меньше скорости света).
[править] Формула преобразования скоростей

Достаточно продифференцировать в формуле преобразований Галилея, приведенной выше, и сразу же получится приведенная в том же параграфе рядом формула преобразования скорости.
Приведем более элементарный, но и более общий вывод — для случая произвольного движения начала отсчета одной системы относительно другой (при отсутствии вращения). Для такого более общего случая, можно получить формулу преобразования скоростей, например, так.

Рассмотрим преобразование произвольного сдвига начала отсчета на вектор ,

где радиус-вектор какого-то тела A в системе отсчета K обозначим за , а в системе отсчета K’ — за ,

подразумевая, как всегда в классической механике, что время t в обеих системах отсчета одно и то же, а все радиус-векторы зависят от этого времени: .
Тогда в любой момент времени

и в частности, учитывая

,



— средняя скорость тела A относительно системы K;

— средняя скорость тела А относительно системы K’ ;

— средняя скорость системы K’ относительно системы K.

Если то средние скорости совпадают с мгновенными:


— как для средних, так и для мгновенных скоростей (формула сложения скоростей).
Таким образом, скорость тела относительно неподвижной системы координат равна векторной сумме скорости тела относительно движущейся системы координат и скорости системы отсчета относительно неподвижной системы отсчета. Аналогично можно получить формулу преобразования ускорений при переходе из одной системы координат в другую, верную при условии, что эти системы движутся поступательно друг относительно друга: