Определение координат источника радиоизлучения Текст научной статьи по специальности «Физика»
Описывается метод определения координат источника радиоизлучения при приеме радиосигналов одного источника радиоизлучения с использованием нелинейных (в том числе круговых) антенных систем (АС) произвольной формы, состоящих из слабонаправленных и направленных элементов (вибраторов). Также рассмотрены методы определения пеленгов. Применяются многопозиционные системы регистрации, размещенные как на земле, так на летательных аппаратах. Повышения точности и скорости нахождения координат источника радиоизлучения достигают благодаря использованию особенностей нелинейных АС, позволяющих устранить влияние неучтенной помехи на значения пеленгов , и путем сведения алгоритма нахождения параметров сигнала к прямому расчету по элементарным формулам. Точечные оценки координат одного источника радиоизлучения проводят по имеющемуся набору измерений пеленгов различными методами с учетом погрешностей всех измерений и получают эллипсоид рассеяния координат ИРИ.
i Надоели баннеры? Вы всегда можете отключить рекламу.
Похожие темы научных работ по физике , автор научной работы — Грешилов Анатолий Антонович
Способ определения интервальных оценок пеленгов и координат источника радиоизлучения
Определение амплитуды, азимутальных и угломестных пеленгов и начальной фазы радиоизлучателя
Определение пеленгационной панорамы по сигналам от разреженных радиоизлучателей
Учет погрешностей значений координат элементов и параметров антенных систем при определении пеленгов источников радиоизлучения
Многосигнальная пеленгация на одной частоте как задача разложения сигнала на сумму экспонент
i Не можете найти то, что вам нужно? Попробуйте сервис подбора литературы.
i Надоели баннеры? Вы всегда можете отключить рекламу.
The method of determining the coordinates of the radio source
The article describes a method for determining coordinates of the radio source when receiving a signal from a radio radiation source (SRE) using a nonlinear (including annular) antenna system (AS), an arbitrary shape consisting of poorly directed and directional elements (vibrators), and other methods of determining direction, for example, based on the Doppler effect, radio imaging, and others. Multistage registration systems as featured on the ground, on aircraft are used. Improved the accuracy and reduced the time to determine the origin of the radio source are achieved by use, an universal formula describing the complex envelope outputs of the AS, which allows to obtain explicit expressions for calculating the amplitude and initial phase of the bearing signals. The collected values of bearings from different devices detect the signal of SRE using the methods of confluent analysis, obtained equations of the lines in the plane and in space, the intersection of which determines the coordinates of the point estimates of the radiation source. For estimates of bearings and coordinates the radiation source is obtained, covariance matrix scattering estimates is obtained from an ellipse or ellipsoid scattering unknown quantities.
Текст научной работы на тему «Определение координат источника радиоизлучения»
Определение координат источника радиоизлучения
© А. А. Грешилов МГТУ им. Н.Э. Баумана, Москва, 105005, Россия
Описывается метод определения координат источника радиоизлучения при приеме радиосигналов одного источника радиоизлучения с использованием нелинейных (в том числе круговых) антенных систем (АС) произвольной формы, состоящих из слабонаправленных и направленных элементов (вибраторов). Также рассмотрены методы определения пеленгов. Применяются многопозиционные системы регистрации, размещенные как на земле, так на летательных аппаратах. Повышения точности и скорости нахождения координат источника радиоизлучения достигают благодаря использованию особенностей нелинейных АС, позволяющих устранить влияние неучтенной помехи на значения пеленгов, и путем сведения алгоритма нахождения параметров сигнала к прямому расчету по элементарным формулам. Точечные оценки координат одного источника радиоизлучения проводят по имеющемуся набору измерений пеленгов различными методами с учетом погрешностей всех измерений и получают эллипсоид рассеяния координат ИРИ.
Ключевые слова: пеленг, антенные системы, источник радиоизлучения, итерационный процесс, обратная матрица.
Введение. Пеленгация источников радиоизлучения (ИРИ) имеет место в процессе мониторинга радиоэлектронной обстановки. При этом необходимо определять азимутальные, угломестные пеленги ИРИ и амплитуду сигнала, по которым устанавливают координаты источника радиоизлучения. Пеленгатор регистрирует излучение путем записи сигналов на элементы (вибраторы) антенной системы (АС). Выполняя различные действия над сигналами, принимаемыми вибраторами, определяют параметры излучения, а затем координаты источника радиоизлучения. Проблема состоит в том, чтобы понять, какие действия над сигналами окажутся эффективнее. Данной проблеме посвящены работы [1, 2]. В частности, наиболее полно проблема определения координат источника излучения (ИРИ) рассмотрена в [2]. Прием сигналов ИРИ осуществляется в заданной полосе частот AF перемещающимся в пространстве бортовым пеленгатором на летно-подъемном средстве (ЛПС). Измеряются пространственно-информационные параметры обнаруженных сигналов: азимута 9г. и угла места Рг. в системе координат антенной системы с одновременным определением местоположения ЛПС , где Др8, LipS и Hp — широта, долгота и высота ЛПС соответственно. Предварительно устанавливают
удаления ИРИ d. от ЛПС и координаты ИРИ Vп. =. в
момент времени t. в левосторонней системе декартовых координат антенной системы пеленгатора. Корректируют координаты ИРИ V у. = . с учетом априорно известной ориентации антенной системы бортового пеленгатора относительно ЛПС путем последовательного умножения значений координат Vпi на соответствующие углам Эйлера матрицы поворота. После чего вычисляют истинные геоцентрические координаты местоположения ИРИ
Курсовой угол летно-подъемного средства находят по принятым радиосигналам от космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС). Координаты ИРИ получают с помощью пеленгатора, состоящего из антенной решетки, которая выполнена из N > 2 идентичных ненаправленных антенных элементов, расположенных в плоскости пеленгования. С помощью внешнего генератора с шагом Д9 и Др проводится измерение фаз на элементах АС. Полученные данные запоминают, и в дальнейшем они служат для определения пространственно-информационных параметров обнаруженных сигналов (азимута 9 и угла места Р). Причем эти измерения осуществляются путем облета ЛПС.
Этот способ определения пеленгов имеет недостатки:
1) не обеспечивает высокую точность результатов, используя заранее подготовленную таблицу, которая связывает показания на элементах АС с азимутальными и угломестными пеленгами, полученными с помощью внешнего генератора, включая облет ЛПС;
2) степень отличия измеренных параметров Дф l,h изм (fV) от эталонных значений Дф l,h эт (fv), рассчитанных для всех направлений прихода сигнала Д9 к и Ар с и всех fV, вычисляют по формуле [2]
н9,р(fv) = 11 (¿4Ak,с эт(fv)-Дф1,h измf j . (1)
Однако формула (1) не содержит какую-либо информацию о погрешностях указанных величин;
3) отсутствует четкий алгоритм определения погрешностей координат источника излучения;
4) проведение многочисленных математических операций с измеренными величинами (случайными величинами). Ошибки при каждой такой операции накапливаются, но авторы не уделяют этому внимания.
В настоящей работе описывается способ определения координат ИРИ, в котором учитываются указанные недостатки.
Определение азимутальных и угломестных пеленгов. Процедура нахождения координат источника излучения базируется на знании азимутальных и угломестных пеленгов, на основании которых записывают уравнения линий на плоскости или в пространстве. Координаты точки пересечения линий и есть координаты источника излучений. Как показано в работе [2], результаты, полученные в одной системе координат, легко пересчитываются в другие системы координат. Выберем декартову прямоугольную систему координат.
В работе [3] описан метод определения пеленгов сигналов, зарегистрированных АС любой конфигурации. Он заключается в том, что любую АС можно свести к линейной, к системе круговых АС с общим фазовым центром и т. п. и сформулировать таким образом функцию, описывающую комплексную огибающую сигнала ИРИ на выходе элементов АС. От полученной функции на выходе элементов АС и от комплексных чисел на элементах АС берут натуральный логарифм. Приравнивают соответствующие действительные и мнимые части. Из равенства действительных частей определяют амплитуду сигнала, а из равенства мнимых — фазы. Записывая равенства мнимых частей для всех элементов АС, получаем систему алгебраических уравнений, из которой вычисляют азимутальный и угломестный пеленги, а также начальную фазу сигнала. Для предлагаемого способа необходимо иметь не менее двух элементов АС, отстоящих на разные углы от направления отсчета. Для круговой (кольцевой) АС, согласно этому способу, получаем формулы для оценок азимутального и угломестного пеленгов и начальной фазы сигнала. Из системы линейных алгебраических уравнений
sin у2 1 — cos у2 sin у3 1 — cos у3 sin у 1 — cos у
Выследить. радиоприемник!

Пеленгация — непременный атрибут радиосвязи. Определение направления на радиосигнал и поиск его источника используется в радиоразведке, в оперативно-следственных мероприятиях для слежения за жучками-маячками, при поиске терпящих бедствие на суше и на море и даже в технических видах спорта, таких как «охота на лис». Во всех этих случаях пеленгаторы обнаруживают передатчики, то есть радиопередающие устройства, излучатели радиосигнала. Однако порой с помощью пеленгационного оборудования можно выявить и… радиоприемник, то есть устройство, которое должно ловить радиоволны, а не излучать их!
Передатчик… внутри приемника
«Запеленговать радиоприемник» — звучит, на первый взгляд, абсурдно… Как можно засечь устройство, которое не излучает радиосигнал в эфир?! Однако это действительно возможно. Для понимания принципа пеленгации радиоприемников начать придется с теории. Несложной, на уровне школьного радиокружка.
Диапазон принимаемых частот почти любого радиоприемника весьма широк — часто не менее двух-трех десятков мегагерц. На любой частоте этого диапазона приемник должен уметь одинаково хорошо выделять и усиливать принимаемый радиосигнал, что технически достаточно непросто. Для решения этой задачи обычно сигнал любой принимаемой частоты преобразовывают в сигнал с фиксированной и неизменной частотой, так называемой промежуточной. И уже ее затем фильтруют, очищают, усиливают и детектируют в звук, который мы слышим из динамика. Постоянно работать с одной и той же «промежуткой» каскадам приемника гораздо проще, чем со всем спектром диапазона.
Чтобы из всего диапазона принимаемых антенной частот получать единую промежуточную, в приемниках используется два узла — гетеродин и смеситель. Гетеродин — это… радиопередатчик внутри радиоприемника! Правда, чрезвычайно маломощный. Именно изменение частоты гетеродина мы осуществляем, когда вращаем ручку настройки на станцию. В смеситель же одновременно попадают два сигнала: принимаемая частота и частота гетеродина. При их смешивании выделяется разница — та самая промежуточная частота. В СССР стандартом промежуточной частоты для бытовой радиоаппаратуры было 465 килогерц. Образовывалось это число путем вычитания из частоты сигнала радиостанции частоты гетеродина.
И вот мы и подошли непосредственно к технологии радиопеленгации приемников! Несмотря на ничтожнейшую мощность встроенного в каждый приемник гетеродина, его излучение имеет «паразитное» свойство просачиваться при работе в приемную антенну и уходить в эфир. И очень чувствительными пеленгаторами с эффективными направленными антеннами это излучение можно обнаружить!
«КГБ-джаз»
В Советском Союзе многие граждане любили послушать так называемые «голоса» — зарубежные радиостанции, вещающие из-за границы на территорию СССР на русском языке. В качестве мощного рычага пропаганды западное иновещание развернулось почти сразу после окончания Второй мировой войны и в качестве идеологического оружия существовало чуть ли не до начала 90-х годов ХХ века. Кого-то из слушателей привлекал экстрим явной антисоветчины, кто-то вылавливал в эфире «битлов» и «роллингов». В 60-е в народе даже ходила популярная шутка: «есть обычай на Руси — ночью слушать «Би-би-си!».
Меры против иновещания принимались серьезные: в выпускаемых и продаваемых в Союзе радиоприемниках намеренно ограничивался частотный диапазон, затруднявший прием «голосов», а по всей стране была раскидана сеть передатчиков помех — «глушилок». Однако граждане азартно дорабатывали «на коленке» отечественную технику, покупали импортные радиолы в комиссионных магазинах и инвалютных «Березках» и упорно искали «окна» в гудении «глушилок», чей узнаваемый шум в народе прозвали «КГБ-джазом».
Надо отметить, что прямо-таки массовой охоты на слушателей «голосов» не было — если диссидентство ограничивалось ночным кухонным бдением возле радио, то внимания спецслужб такой гражданин не привлекал. Но к тем, кто был под подозрением по иным шалостям, могли направить специальную мобильную моторизованную бригаду «слухачей», способных с улицы обнаружить в квартире радиоприемник, настроенный на «Голос Америки» или «Радио Свобода».
Поймав частоту гетеродина, они буквально на пальцах проводили простейшее арифметическое вычисление и выясняли, какая радиостанция принимается в данный момент в доме! К примеру, рядом с домом пеленгатор улавливал слабый сигнал с частотой 12.815 мГц. Вычитаем из него 465 кГц (ту самую промежуточную частоту) и получаем 12.350 мГц, а это как раз частота «Радио Свобода»… Попался, голубчик! И если точный адрес был неизвестен, его часто вычисляли по длинным проволочным антеннам, тянущимся из окон на близлежащие деревья, и по горящим в ночи окошкам. Ибо кому еще не спать в Советском Союзе по ночам, как не радиослушателям-диссидентам… Откройте, милиция!

И телевизоры, и антирадары…
Собственно, любой телевизор по своей сути это тот же самый радиоприемник, имеющий гетеродин, смеситель и использующий метод преобразования принимаемой частоты в промежуточную. А значит, он точно так же может быть запеленгован! Трудно поверить, что подобное может понадобиться на практике, однако в некоторых странах Европы существовала и продолжает существовать по сей день система сбора абонентской платы для владельцев телевизоров, подключенных не к кабелю или «тарелке», а к обычной эфирной антенне.
Особенно суров контроль за этим оброком в Великобритании, где еще в 1951 году тогдашний генерал-почтмейстер (аналог министра связи и массовых коммуникаций) лорд де ла Варр учредил Инспекцию телевизионных лицензий, оснащенную специально оборудованными пеленгационными автомобилями. Нарушителей, которые обзавелись телевизором, но не поставили власти в известность, дабы не платить лицензионный сбор, вычисляли курсирующие по улицам спецавтомобили. Большая часть их, правда, были обманками — антенны представляли собой муляжи, рассчитанные на мотивацию населения к добровольной оплате через устрашение. Но часть — вполне работоспособными, действующими как раз по принципу обнаружения сигнала гетеродина, пробивающегося в телеантенну!
Кстати, характерно, что эта практика в Великобритании продолжается и поныне, разве что автомобили стали современнее и оборудование — эффективнее. В середине ХХ века возмущенные таким тотальным контролем британцы швыряли в машины инспекторов помидоры и забивали им в глушители картошку, однако, к чести лорда де ла Варра, автомобили-пеленгаторы хотя бы не скрывали антенны и были отмечены символикой на бортах — генерал-почтмейстер изначально заявил, что не собирается создавать службу тайных соглядатаев… А вот в наши дни завет министра забыт — современные пеленгаторы ездят скрытно, ничем не выдавая себя внешне!
Еще один пример вполне массового пеленгования радиоприемников — борьба с нелегальными автомобильными радар-детекторами. Эти гаджеты, свободно продающиеся в России и отлично известные едва ли не каждому нашему автомобилисту, в ряде стран под строгим запретом. Однако некоторые несознательные граждане их все же используют, несмотря на запрещающие законы, и поэтому на вооружении полиции стоит спецаппаратура, позволяющая обнаружить в автомобиле даже скрытно размещенный внутри бампера или под обшивками гаджет. Принцип выявления тот же самый — по паразитному излучению гетеродина, работающего в составе приемника радар-детектора.
RU2434240C1 — Способ определения направления на источник радиоизлучения и пеленгатор — Google Patents
Publication number RU2434240C1 RU2434240C1 RU2010144727/09A RU2010144727A RU2434240C1 RU 2434240 C1 RU2434240 C1 RU 2434240C1 RU 2010144727/09 A RU2010144727/09 A RU 2010144727/09A RU 2010144727 A RU2010144727 A RU 2010144727A RU 2434240 C1 RU2434240 C1 RU 2434240C1 Authority RU Russia Prior art keywords finding receiving devices antenna signals signal Prior art date 2010-11-01 Application number RU2010144727/09A Other languages English ( en ) Inventor Владимир Николаевич Вернигора (RU) Владимир Николаевич Вернигора Николай Пантелеевич Лопатько (RU) Николай Пантелеевич Лопатько Петр Анатольевич Половинкин (RU) Петр Анатольевич Половинкин Николай Александрович Толстоконев (RU) Николай Александрович Толстоконев Original Assignee Федеральное государственное унитарное предприятие «Всероссийский научно-исследовательский институт «Градиент» Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.) 2010-11-01 Filing date 2010-11-01 Publication date 2011-11-20 2010-11-01 Application filed by Федеральное государственное унитарное предприятие «Всероссийский научно-исследовательский институт «Градиент» filed Critical Федеральное государственное унитарное предприятие «Всероссийский научно-исследовательский институт «Градиент» 2010-11-01 Priority to RU2010144727/09A priority Critical patent/RU2434240C1/ru 2011-11-20 Application granted granted Critical 2011-11-20 Publication of RU2434240C1 publication Critical patent/RU2434240C1/ru
Links
Images

Abstract
Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля и радиотехнической разведки для определения направления на источник радиоизлучения. Достигаемый технический результат изобретения повышение чувствительности и точности пеленгования, а также быстродействия. Сущность способа состоит в том, что излучаемый сигнал принимают пеленгационной антенной, состоящей из М идентичных антенн, фокальные оси которых сдвинуты относительно друг друга в плоскости пеленгования таким образом, что смежные диаграммы направленности антенн образуют идентичные пеленгационные характеристики, а в сумме М антенн перекрывают всю зону наблюдения 360°, принятые сигналы распределяют по трем идентичным приемным устройствам, при этом обзор всей зоны наблюдения осуществляют электронным переключением М выходов пеленгационной антенны ко входам трех приемных устройств таким образом, что ко входам приемных устройств на время определения направления на источник радиоизлучения всегда подключены одновременно три смежные антенны, в каждом приемном устройстве принятые сигналы распределяют по идентичным частотным поддиапазонам, в каждом из которых сигналы усиливают, детектируют, результат детектирования усиливают логарифмическим видеоусилителем, измеряют мощность усиленных сигналов с учетом поправок на неидентичность коэффициентов передачи приемных устройств, которую определяют и запоминают при периодической калибровке приемных устройств в каждом поддиапазоне частот и в динамическом диапазоне 2 входных сигналов, по соотношению мощностей определяют частотный поддиапазон, в котором принят сиг
Description
Изобретение относится к радиотехнике и может быть использовано в системах радиоконтроля и радиотехнической разведки для определения направления на источник радиоизлучения.
Известны способы пеленгации радиосигналов и пеленгаторы для их осуществления, реализующие корреляционно-интерферометрический метод пеленгования (патент РФ №2190236 от 13.09.2000 г., патент РФ №2201599 от 27.03.2002 г., патент РФ №2263327 от 27.10.2005 г., патент РФ №2341811 от 20.12.2008 г.).
Ограничением указанных способов и устройств является сравнительно узкая полоса частот одновременной разведки.
Известен способ обнаружения и определения пеленга и частоты ИРИ, реализующей корреляционную обработку на основе статического анализа спектральных плотностей энергии сигнала и шума (патент РФ №2190236 от 27.09.2002 г.). Ограничениями данного способа является достаточно большое время для проведения статического анализа.
Известны также амплитудные и фазовые пеленгаторы (а.с. СССР №1840389, опубл. 20.11.06 г. и заявки JP 2005062144, опубл. 10.03.05 г., US 2006158375, опубл. 20.07.06 г., CN 101206257, опубл. 25.06.08 г., WO 2005073749, опубл. 11.08.2005 г.).
Ограничениями амплитудных пеленгаторов являются недостаточно высокая точность пеленгования из-за ошибок, вызванных неидентичностью коэффициентов усиления приемных каналов пеленгатора, особенно в широком диапазоне частот.
Ограничениями фазовых пеленгаторов является сравнительно узкая полоса частот одновременной разведки и ограниченная зона однозначного пеленгования, что вызывает необходимость применения многобазовых методов пеленгования.
Наиболее близким к предлагаемому способу определения направления на источник радиоизлучения, входящим в группу изобретений, является способ амплитудного пеленгования источников радиоизлучений (патент РФ №2319975 от 20.03.2008 г.), в котором излучаемый сигнал принимают М идентичными антеннами, фокальные оси которых сдвинуты в плоскости пеленгования одна относительно другой таким образом, что диаграммы направленности смежных антенн пересекаются на уровне не более 3-х децибел, а все М антенн в сумме перекрывают сектор пеленгования 360°. Принятые сигналы распределяют по М идентичным приемным каналам, в каждом из которых поступивший в него сигнал усиливают, детектируют, результат детектирования усиливают в логарифмическом усилителе, измеряют мощность усиленных сигналов в канале с максимальным уровнем и в двух смежных с ним и по соотношению мощностей измеренных сигналов определяют направление на источник излучения, расчет направления φи на источник излучаемого сигнала осуществляют по формулам:

φи=φN+β·sign(PN+1-PN-1),
где β — модуль углового отклонения направления на пеленгуемый источник излучения от фокальной оси антенны приемного канала с максимальным уровнем сигнала;
δ1, δ2, δ3 — модуль нормированного относительного (в децибелах) коэффициента усиления антенны при угловых отклонениях направления прихода сигнала от ее фокальной оси θ0, 4/3 θ0 и 2/3 θ0 соответственно;
N — номер приемного канала с максимальным уровнем сигнала;
Pn, Pn+1, Pn-1 — относительные, отсчитанные от уровня чувствительности в децибелах уровни мощности принятого сигнала в N-м приемном канале и в смежных с ним справа и слева соответственно;
φN — направление фокальной оси антенны N-го приемного канала.
Данный способ выбран в качестве прототипа.
Ограничениями указанного способа являются:
— низкая чувствительность, так как для обнаружения сигнала одновременно в трех смежных каналах РПУ необходимо иметь запас по чувствительности пеленгатора не менее 15 дБ;
— при работе в широком диапазоне частот и большом динамическом диапазоне входных сигналов возможно снижение точности пеленгования за счет неидентичности коэффициентов усиления различных каналов РПУ и изменения ширины ДН антенн, а следовательно, и соотношения уровней сигналов в соседних каналах;
— достаточно высокая сложность реализации из-за большого числа приемных каналов.
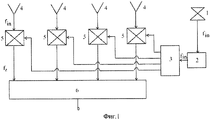
Наиболее близким к предлагаемому пеленгатору по принципу построения является пеленгатор по патенту DE 3347068 от 26.03.92 г., схема которого приведена на фиг.1. Пеленгатор содержит ненаправленную антенну 1, многоканальное радиоприемное устройство 2, делитель мощности 3, направленные пеленгационные антенны 4, смесители 5 и вычислительное устройство 6.
Принцип работы пеленгатора состоит в следующем. Всенаправленная антенна 1 и пеленгационные антенны 4 перекрывают весь рабочий диапазон частот. Многоканальное радиоприемное устройство 2 содержит m смежных частотных каналов, перекрывающих весь рабочий диапазон частот. При обнаружении источника радиоизлучения всенаправленной антенной 1 и j-м частотным каналом многоканального радиоприемного устройства 2 сигнал выделяется, усиливается и поступает через делитель мощности 3 на все смесители 5, которые настраиваются на частоту принятого сигнала. Вычислительное устройство 6 определяет направление на источник радиоизлучения известным моноимпульсным амплитудным методом по соотношению уровней сигналов в соседних пеленгационных каналах.
Данный пеленгатор выбран в качестве прототипа заявленного пеленгатора.
Ограничением данного пеленгатора является:
— низкое быстродействие, так как определение направления на каждый из обнаруженных всенаправленной антенной источников радиоизлучения осуществляется последовательно во времени;
— низкая чувствительность, так как чувствительность пеленгатора определяется каналом приема с всенаправленной антенной с низким коэффициентом усиления, а не направленной пеленгационной антенной, у которой коэффициент усиления существенно выше.
Основной задачей, на решение которой направлены заявляемый способ определения направления на источник радиоизлучения и пеленгатор, является улучшение основных технических характеристик.
Единым техническим результатом, достигаемым при осуществлении заявленной группы изобретений, является повышение чувствительности и точности пеленгования, а также быстродействия.
Указанный технический результат достигается тем, что в известном способе амплитудного пеленгования источников радиоизлучений, при котором излучаемый сигнал принимают пеленгационной антенной, состоящей из М идентичных антенн, фокальные оси которых сдвинуты друг относительно друга в плоскости пеленгования таким образом, что смежные диаграммы направленности антенн образуют идентичные пеленгационные характеристики, а в сумме М антенн перекрывают всю зону наблюдения 360°, согласно изобретению принятые сигналы распределяют по трем идентичным приемным устройствам, при этом обзор всей зоны наблюдения осуществляют электронным переключением М выходов пеленгационной антенны ко входам трех приемных устройств таким образом, что ко входам приемных устройств всегда на время определения направления на источник радиоизлучения подключены одновременно три смежные антенны, в каждом приемном устройстве принятые сигналы распределяют по идентичным частотным поддиапазонам, в каждом из которых сигналы усиливают, детектируют, результат детектирования усиливают логарифмическим видеоусилителем, измеряют мощность усиленных сигналов с учетом поправок на неидентичность коэффициентов передачи приемных устройств, которую определяют и запоминают при периодической калибровке приемных устройств в каждом поддиапазоне частот и в динамическом диапазоне входных сигналов, по соотношению мощностей определяют частотный поддиапазон, в котором принят сигнал, а для сигналов, имеющих максимальный уровень в приемном устройстве, подключенном к центральной из трех смежных антенн, определяют направление βi на i-й источник радиоизлучения по пеленгационным характеристикам, образованным центральной и одной из смежных антенн (правой или левой), с большей мощностью сигнала, для j-го частотного поддиапазона, в котором принят сигнал, по формулам:
βi=βРСНk±Δβi,
где βPCHk, градус — значение пеленга для равносигнального направления выбранной k-й пеленгационной характеристики.
Значение +Δβ принимают при определении направления по пеленгационной характеристике, образованной центральной и левой смежными антеннами, а — Δβ — при определении направления по пеленгационной характеристике, образованной центральной и правой смежными антеннами.
Δβi, градус=S(fj)·ΔPi,
где Δβi — отклонение направления на i-й источник радиоизлучения от равносигнального направления выбранной k-й пеленгационной характеристики;
S(fj), градус/дБ — крутизна пеленгационной характеристики в j-м частотном поддиапазоне:
ΔPi, дБ=Pц-Pл(п)±ΔPk(fj,Pi),
где Рц, Рл(п) — относительный уровень мощности сигнала в приемном устройстве, подключенном соответственно к центральной, левой (или правой) из трех смежных антенн;
ΔPk(fj,Pi), дБ — неидентичность коэффициентов передачи приемных устройств, подключенных к центральной и левой (или правой) из трех смежных антенн в j-м частотном поддиапазоне при уровне мощности, соответствующей мощности входного сигнала.
Значение ΔPk(fj,Pi) и знак плюс или минус определяют при калибровке приемных устройств по сигналам синтезатора рабочих частот.
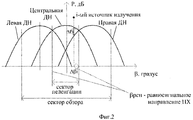
Очевидно, что для определения направления достаточно двух смежных каналов пеленгационной антенны. В предложенном способе используют три смежных канала, так как левый и правый смежные каналы дополнительно используются для компенсации приема по ближним боковым лепесткам центральной антенны, уменьшая тем самым вероятность появления ложных пеленгов при большом уровне входных сигналов.
Структура диаграмм направленности пеленгационной антенны, поясняющая сущность способа определения направления на источник радиоизлучения, приведена на фиг.2.
Указанный технический результат достигается также тем, что в пеленгаторе, содержащем многолучевую пеленгационную антенну, состоящую из М идентичных антенн, фокальные оси которых сдвинуты друг относительно друга в плоскости пеленгования таким образом, что диаграммы направленности смежных антенн образуют идентичные пеленгационные характеристики, а в сумме диаграммы направленности М антенн перекрывают всю зону наблюдения 360°, ненаправленную антенну компенсации приема по боковым лепесткам, четыре идентичных приемных устройства, каждое из которых представляет собой многоканальный приемник и устройство анализа и управления, согласно изобретению выходы многолучевой пеленгационной антенны через переключатель, имеющий М входов и три выхода и через направленный ответвитель подключены ко входам трех приемных устройств, причем переключатель при любых переключениях обеспечивает одновременное подключение выходов трех смежных антенн, ненаправленная антенна также через направленный ответвитель подключена к четвертому приемному устройству, а выходы всех четырех приемных устройств подключены ко входам устройства анализа и управления, управляющие выходы которого подключены ко всем приемным устройствам, переключателю и синтезатору рабочих частот, выход которого через направленный ответвитель подключен ко входам всех четырех приемных устройств.
Сущность изобретения поясняется чертежами, на которых приведены
на фиг 1 — структурная схема пеленгатора прототипа;
на фиг 2 — структура диаграмм направленности пеленгационной антенны;
на фиг.3 — структурная схема пеленгатора;
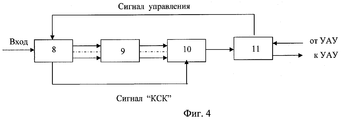
на фиг.4 — структурная схема приемного устройства;
на фиг.5 — структурная схема усилителя преобразователя.
Поскольку заявленный способ реализован в работе устройства, то подробное его описание приведено при описании работы пеленгатора.
Пеленгатор (фиг.3) содержит многолучевую пеленгационную антенну 1, ненаправленную антенну 2. Выходы пеленгационной антенны 1 через переключатель 3 и направленный ответвитель 4 подключены к соответствующим входам трех многоканальных приемных устройств 5, выход ненаправленной антенны 2 подключен через направленный ответвитель 4 ко входу 4-го приемного устройства 5, выходы всех приемных устройств 5 подключены к устройству анализа и управления (УАУ) 7, управляющие выходы которого подключены к переключателю 3, всем приемным устройствам 5 и синтезатору рабочих частот 6, выход которого через направленный ответвитель 4 подключен ко входам всех приемных устройств 5.
Многолучевая пеленгационная антенна 1 состоит из М идентичных антенн, фокальные оси которых сдвинуты друг относительно друга в плоскости пеленгования таким образом, что смежные диаграммы направленности антенн образуют идентичные пеленгационные характеристики. В сумме М антенн перекрывают в плоскости пеленгования всю зону наблюдения 360°. Поскольку ширина парциальной ДН в широком диапазоне частот может изменяться, крутизна пеленгационной характеристики (ПХ) зависит от несущей частоты.
Под крутизной ПХ понимается зависимость соотношения мощностей в пеленгационных каналах от отклонения от равносигнального направления ПХ.
Пеленгационная антенна 1 может быть выполнена в виде М идентичных рупорных, логопериодических или других типов антенн, обеспечивающих требуемую структуру ДН.
Ненаправленная антенна 2 имеет круговую ДН и может быть выполнена в виде биконической антенны.
Многолучевая пеленгационная антенна 1 и ненаправленная антенна 2 перекрывают весь рабочий диапазон частот.
Переключатель 3 содержит М входов по числу выходов многолучевой пеленгационной антенны и три выхода и может быть выполнен на основе 3-х переключателей 4×1, т.е. имеющих 4 входа и один выход. В состав переключателя входит устройство управления, которое обеспечивает отпирание (запирание) соответствующих каналов переключателя 3 по командам от устройства анализа и управления 7. Переключение должно осуществляться таким образом, чтобы всегда ко входам приемных устройств 5 были одновременно подключены три смежных антенны многолучевой пеленгационной антенны 1.
Направленный ответвитель 4 предназначен для подачи сигналов синтезатора рабочих частот 6 на входы всех приемных устройств 5 с целью их калибровки в диапазоне частот. Ослабление направленного ответвителя 4 по направлениям 1-1, 2-2, 3-3, 4-4 минимально с целью не допустить снижения чувствительности пеленгатора. Ослабление сигнала по направлениям 5-1, 5-2 5-3, 5-4 — не менее 20 дБ с целью исключения потерь мощности сигнала ИРИ.
Каждое из приемных устройств 5 представляет собой супергетеродинный двухступенчатый многоканальный приемник. Структурная схема одного приемного устройства 5 приведена на фиг.4.
В состав одного приемного устройства 5 входит усилитель преобразователь 8, детектор логарифмический многоканальный 9, устройство предварительной обработки 10 и устройство буферное 11.
Устройство (УАУ) 7 содержит устройство управления переключателем 3, синтезатором рабочих частот 6 и приемными устройствами 5, а также вычислительное устройство. УАУ 7 — это многопроцессорная вычислительная структура, выполненная на основе сигнальных микропроцессорных устройств и программируемых логических интегральных микросхем (PLIC) (например, типа THS32DVC5402A, ф. Texas Instruments, XC4VLX60FF668 ф.Xilinx, AD9211 ф. Analog Devices).
Синтезатор рабочих частот 6 выполнен на основе серийно выпускаемых генераторов, управляемых напряжением (например V585ME06 ф-Z — comm. США, K03-2700-433-R ф.Мет-Circuits, США) и обеспечивает формирование калибровочных СВЧ-сигналов во всем рабочем диапазоне частот и в динамическом диапазоне входных сигналов.
Пеленгатор работает следующим образом.
Обзор зоны наблюдения осуществляется за счет электронного переключения выходов многолучевой пеленгационной антенны 1, причем таким образом, что всегда к приемным устройствам 5 одновременно подключены три антенны, имеющие смежные диаграммы направленности.
Пеленгатор работает в автоматическом режиме, зона наблюдения задается извне, например с пульта управления станции радиотехнической разведки, куда входит пеленгатор. Если задана зона наблюдения, которая перекрывается одной парциальной диаграммой направленности пеленгационной антенны 1, то переключения не происходит. В этом режиме осуществляется постоянное наблюдение за отдельными источниками излучения. Если зона наблюдения не перекрывается одной парциальной диаграммой направленности пеленгационной антенны 1, то происходит периодическое переключение выходов пеленгационной антенны 1 по изложенному выше алгоритму. Время, в течение которого зона наблюдения не переключается, определяется исходя из необходимости уверенного обнаружения ИРИ и может составлять ориентировочно не более 20 мс.
Сигнал ИРИ, принятый пеленгационной антенной 1 через переключатель 3 и направленный ответвитель 4, поступает на вход усилителя преобразователя 8 приемного устройства 5.
Сигнал ИРИ, принятый ненаправленной антенной 2, поступает через направленный ответвитель 4 на вход четвертого приемного устройства 5.
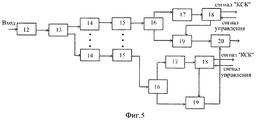
Структурная схема усилителя преобразователя приведена на фиг.5.
Сигнал, поступивший на усилитель преобразователь 8 усиливается в усилителе 12 и через разветвитель 13 и полосовые фильтры 14, обеспечивающие разделение по частотным поддиапазонам с полосой Δfi, поступает на один из преобразователей 15, где преобразуется в промежуточную частоту fn, далее через делитель мощности 16 поступает одновременно на детекторы 17 и быстродействующий коммутатор 19, продетектированный сигнал поступает на устройство управления 18, которое открывает коммутатор 19 и СВЧ-сигнал через сумматор 20 подается на детектор логарифмический многоканальный 9. Сигналы «КСК» (признак наличия сигнала ИРИ) через устройство управления 18 подаются на УПО 10 для определения несущей частоты источника излучения. Коммутаторы 19 могут управляться также извне от устройства анализа и управления 7 через устройство буферное 11.
Усилитель преобразователь 8 является 1-й ступенью супергетеродинного многоканального приемника. Коммутаторы 19 используются для ограничения полосы разве дуемых частот по командам от УАУ 7. Если коммутатор 19 закрыт командой от УАУ 7, сигнал дальше не проходит, если команда от УАУ 7 на запирание отсутствует, то коммутатор 19 открывается приходящим сигналом. Признак отпирания коммутатора 19 (сигнал «КСК») используется как признак наличия сигнала в данном поддиапазоне частот.
Детектор логарифмический многоканальный 9 представляет собой вторую ступень супергетеродинного многоканального приемника 5.
В детекторе логарифмическом многоканальном 9 сигнал промежуточной частоты вновь усиливается, диапазон частот Δfi разделяется с помощью полосовых фильтров на одинаковые поддиапазоны Δf2. Далее СВЧ-сигнал детектируется, усиливается логарифмическими видеоусилителями и подается на вход соответствующего канала устройства предварительной обработки 10 (УПО). Количество входов УПО 10 равно количеству выходов детектора логарифмического многоканального 9. В каждом канале УПО 10 с помощью АЦП происходит преобразование видеосигнала в цифровой код и сравнение кодов амплитуд сигналов ИРИ. По номеру канала детектора логарифмического многоканального 9 и признаку о срабатывании коммутатора усилителя преобразователя 8 (сигнал «КСК») определяется значение несущей частоты ИРИ fi.
Информация о коде несущей частоты и амплитуде сигнала поступает через устройство буферное 11 на УАУ 7. В УАУ 7 производится сравнение уровней сигналов ИРИ для значения fi, в том числе и для сигналов, принятых ненаправленной антенной 2, и определяется номер приемного устройства 5 с максимальной амплитудой сигнала. Если сигнал имеет максимальную амплитуду в канале приемного устройства 5, подключенному к центральной из 3-х смежных пеленгационных антенн 1, он принимается к обработке. В противном случае обработка прекращается. Значение пеленга i-го источника радиоизлучения β1 определяется в УАУ 7 моноимпульсным амплитудным методом по формулам:
где βрсн (градус) — значение пеленга для равносигнального направления выбранной пеленгационной характеристики, значение (+Δβi) принимают при определении направления по пеленгационной характеристике, образованной центральной и левой смежными антеннами, а (-Δβi) — при определении направления по пеленгационной характеристике, образованной центральной и правой смежными антеннами.
Δβi, градус=S(fj)·ΔРi,
где Δβi — отклонение направления на i-й ИРИ от равносигнального направления выбранной пеленгационной характеристике;
S(fj), градус/дБ — крутизна пеленгационной характеристики в j-м частотном поддиапазоне.
ΔPi, дБ=Рц-Рл(п)±ΔPk(fj,Pi),
где Pц, Рл(п), дБ — относительный уровень мощности сигнала в приемном устройстве, подключенном к центральной, левой (или правой) из трех смежных антенн;
ΔPk(fj,Pi) — неидентичность коэффициентов передачи приемных устройств, подключенных к центральной и левой (или правой) из трех смежных антенн в j-м частотном поддиапазоне, при уровне мощности, соответствующей мощности входного сигнала.
Значение ΔP(fj,Pi) и знак плюс или минус определяют при калибровке по сигналам синтезатора рабочих частот.
Таким образом АР определяется с учетом периодической калибровки трактов приемных устройств 5 с помощью сигналов синтезатора частот 6, что позволяет уменьшить погрешность пеленгования, вызванную неидентичностью коэффициента передачи приемных устройств 5 в широком диапазоне частот и при большом динамическом диапазоне входных сигналов. Поправочные коэффициенты для расчета ΔР после проведения калибровки запоминаются в УАУ 7. Калибровка производится в каждом поддиапазоне частот с дискретой канала детектора логарифмического многоканального 10 Δf2. Количество дискрет в динамическом диапазоне определяется характеристиками приемных устройств 5.
Периодичность калибровки выбирается такой, чтобы она не влияла на основную работу пеленгатора, и может составлять десятки минут.
То, что калибровка позволяет уменьшить погрешность определения направления на ИРИ за счет неидентичности коэффициента передачи приемных трактов, подтверждаются следующими выкладками.
Допустим, что
f(θ1) и f(θ2) — функции, описывающие парциальные диаграммы направленности пеленгационной антенны;
К1, К2 — коэффициенты усиления приемных каналов 1 и 2;
Δu — сигнал, несущий информацию об угле прихода.
Можно показать, что при условии, что К1, К2 — линейные функции, а погрешность логарифмирования незначительна
![]()
Δu’=lgk1-lgk2 — ошибка, обусловленная неидентичностью коэффициентов передачи приемных каналов.
При подаче калибровочного сигнала
![]()
В результате вычитания сигналов 1 и 2 получаем
Δu=lgf(θ1)-lgf(θ2)+lgk1(fc)-lgk2(fc)-lgk2(fk)+lgk2(fk)
Δu’=lgk1(fc)-lgk1(fk)+lgk2(fc)-lgk2(fk).
Если k1 и k2 на частотах сигнала fc и калибровки fk отличаются незначительно, то ошибка за счет разноканальности уменьшается.
Значение пеленга β усредняется за время наблюдения в УАУ 7 и выдается внешнему потребителю.
Если в зоне наблюдения несколько ИРИ, то пеленги определяются по каждому из них, причем обработка сигналов всех ИРИ проводится параллельно. После обработки всех сигналов происходит переключение и по изложенному выше алгоритму осуществляется обработка сигналов ИРИ в новой пространственной зоне наблюдения.
Таким образом, если зона наблюдения не перекрывается одной парциальной диаграммой направленности пеленгационной антенны 1, то происходит переключение выходов пеленгационной антенны 1 до тех пор, пока вся зона наблюдения не будет просмотрена, далее цикл повторяется.
Claims ( 2 )
1. Способ определения направления на источник радиоизлучения, при котором излучаемый сигнал принимают пеленгационной антенной, состоящей из М идентичных антенн, фокальные оси которых сдвинуты друг относительно друга в плоскости пеленгования таким образом, что смежные диаграммы направленности антенн образуют идентичные пеленгационные характеристики, а в сумме М антенн перекрывают всю зону наблюдения 360°, отличающийся тем, что принятые сигналы распределяют по трем идентичным приемным устройствам, при этом обзор всей зоны наблюдения 360° осуществляют электронным переключением М выходов пеленгационной антенны ко входам трех приемных устройств, причем переключение осуществляют таким образом, что ко входам приемных устройств на время определения направления на источник радиоизлучения всегда одновременно подключены три смежные антенны, а в каждом приемном устройстве принятые сигналы распределяют по идентичным частотным поддиапазонам, в каждом из частотных поддиапазонов сигналы усиливают, детектируют, результат детектирования усиливают логарифмическим видеоусилителем, измеряют мощность усиленных сигналов с учетом поправок на неидентичность коэффициентов передачи приемных устройств, которую определяют и запоминают при периодической калибровке приемных устройств по сигналам синтезатора частот в каждом поддиапазоне частот и в динамическом диапазоне входных сигналов, затем по соотношению измеренных мощностей усиленных сигналов определяют частотный поддиапазон, в котором принят сигнал, и для сигналов, имеющих максимальный уровень в приемном устройстве, подключенном к центральной из трех смежных антенн, определяют направление βi на i-й источник радиоизлучения по пеленгационным характеристикам, образованным центральной и одной из смежных антенн (правой или левой), с большим уровнем сигнала, со значением крутизны для j-го частотного поддиапазона, в котором принят сигнал, по формулам:
βi=βрсн±Δβi,
где Ррсн (градус) — значение пеленга для равносигнального направления выбранной пеленгационной характеристики, значение (+Δβi) принимают при определении направления по пеленгационной характеристике, образованной центральной и левой смежными антеннами, a (-Δβi) — при определении направления по пеленгационной характеристике, образованной центральной и правой смежными антеннами, Δβi, градус=S(fj)·ΔPi,
где Δβi — отклонение направления на i-й источник радиоизлучения от равносигнального направления выбранной пеленгационной характеристики,
S(fj), градус/дБ — крутизна пеленгационной характеристики в j-м
частотном поддиапазоне,
ΔPi, дБ=Рц-Рл(п)±ΔРk(fj,Pi),
где Рц, Р л(п), дБ — относительный уровень мощности сигнала в приемном устройстве, подключенном к центральной, левой (или правой) из трех смежных антенн,
ΔPk(fj,Pi) — неидентичность коэффициентов передачи приемных устройств, подключенных к центральной и левой (или правой) из трех смежных антенн в j-м частотном поддиапазоне, при уровне мощности, соответствующей мощности входного сигнала, причем значение ΔP((fj,Pi) и знак плюс или минус определяют при калибровке по сигналам синтезатора рабочих частот.
2. Пеленгатор, содержащий многолучевую пеленгационную антенну, состоящую из М идентичных антенн, фокальные оси которых сдвинуты друг относительно друга в плоскости пеленгования таким образом, что диаграммы направленности смежных антенн образуют идентичные пеленгационные характеристики, а в сумме диаграммы направленности М антенн перекрывают всю зону наблюдения 360°, ненаправленную антенну компенсации приема по боковым лепесткам, четыре идентичных приемных устройства, каждое из которых представляет собой многоканальный приемник, и устройство анализа и управления, отличающийся тем, что выходы многолучевой пеленгационной антенны через переключатель, имеющий М входов и три выхода, и через направленный ответвитель подключены ко входам трех приемных устройств, причем переключатель при любых переключениях обеспечивает одновременное подключение выходов трех смежных антенн, ненаправленная антенна также через направленный ответвитель подключена к четвертому приемному устройству, а выходы всех четырех приемных устройств подключены ко входам устройства анализа и управления, управляющие выходы которого подключены ко всем четырем приемным устройствам, переключателю и синтезатору рабочих частот, выход которого через направленный ответвитель подключен ко входам всех четырех приемных устройств.
RU2010144727/09A 2010-11-01 2010-11-01 Способ определения направления на источник радиоизлучения и пеленгатор RU2434240C1 ( ru )
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2010144727/09A RU2434240C1 ( ru ) | 2010-11-01 | 2010-11-01 | Способ определения направления на источник радиоизлучения и пеленгатор |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2010144727/09A RU2434240C1 ( ru ) | 2010-11-01 | 2010-11-01 | Способ определения направления на источник радиоизлучения и пеленгатор |
RU2763872C1 — Способ обнаружения источника радиоизлучения по статистическим характеристикам радиосигнала — Google Patents
Publication number RU2763872C1 RU2763872C1 RU2021105245A RU2021105245A RU2763872C1 RU 2763872 C1 RU2763872 C1 RU 2763872C1 RU 2021105245 A RU2021105245 A RU 2021105245A RU 2021105245 A RU2021105245 A RU 2021105245A RU 2763872 C1 RU2763872 C1 RU 2763872C1 Authority RU Russia Prior art keywords signal radio signals identifiers analyzed Prior art date 2021-03-02 Application number RU2021105245A Other languages English ( en ) Inventor Сергей Васильевич Стрельников Роман Владимирович Яковец Александр Григорьевич Шаблинский Сергей Николаевич Бирюлин Original Assignee Сергей Васильевич Стрельников Роман Владимирович Яковец Александр Григорьевич Шаблинский Сергей Николаевич Бирюлин Priority date (The priority date is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the date listed.) 2021-03-02 Filing date 2021-03-02 Publication date 2022-01-11 2021-03-02 Application filed by Сергей Васильевич Стрельников, Роман Владимирович Яковец, Александр Григорьевич Шаблинский, Сергей Николаевич Бирюлин filed Critical Сергей Васильевич Стрельников 2021-03-02 Priority to RU2021105245A priority Critical patent/RU2763872C1/ru 2022-01-11 Application granted granted Critical 2022-01-11 Publication of RU2763872C1 publication Critical patent/RU2763872C1/ru
Links
Images

Classifications
-
- G — PHYSICS
- G06 — COMPUTING; CALCULATING OR COUNTING
- G06F — ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00 — Pattern recognition
Abstract
Изобретение относится к способам и устройствам распознавания объекта с использованием электронных средств. Технический результат заключается в обнаружении различных источников излучения радиосигналов, отличающихся друг от друга значениями по свойственным им параметрам излучаемого сигнала. Результат достигается за счет того, что в качестве свойственных каждому сигналу параметров применяются характеристики сигнала, рассчитанные методами математической статистики, а отличающиеся между собой сигналы и источники радиоизлучения обнаруживают путем сравнительного анализа статистических параметров различных сигналов, принятых на интервале мониторинга. Способ обеспечивает распознавание источника радиоизлучения по свойственным источнику статистическим характеристикам излучаемого радиосигнала. Применение способа при мониторинге радиосигналов позволяет установить, соответствует ли анализируемый сигнал радиоизлучающему средству, сигналы которого уже ранее были зарегистрированы, либо анализируемый сигнал относится к новому радиоизлучающему средству и новому объекту. 1 ил., 1 табл.
Description
Область техники, к которой относится изобретение
Изобретение относится к способам и устройствам распознавания объекта с использованием электронных средств. Способ обеспечивает распознавание источника радиоизлучения по свойственным источнику статистическим характеристикам параметров излучаемого радиосигнала.
Заявленный способ может быть использован при мониторинге радиосигналов, решении задачи идентификации радиосигнала и обнаружении источника радиоизлучения при слабом уровне сигнала, препятствующем его декодированию, в случае если при обработке выборок регистрируемых сигналов могут быть обнаружены численные параметры сигналов, характерные для радиоизлучающего средства, установленного на объекте и являющегося источником анализируемого радиосигнала.
Предложенный способ может быть рекомендован, например, в случае обработки сигналов автоматической системы идентификации судов, предназначенной для обеспечения безопасности судоходства. В соответствии с процедурой обмена информацией для автоматической системы идентификации судов установлены интервалы между радиосообщениями, передаваемыми судовой аппаратурой. Так при скорости судна более 14 узлов или смене курса номинальный интервал составляет 2 секунды [1, с. 20]. На практике интервалы излучения различных судов отличаются в связи с отличием свойств и параметров судовой радиоизлучающей аппаратуры, поэтому интервалы излучения радиосообщений могут быть использованы для идентификации радиосигнала и распознавании суда.
При низком уровне сигнала, препятствующем его декодированию, заявленный способ позволяет идентифицировать объект путем статистической обработки параметров наблюдаемых радиосигналов с использованием методов математической статистики. В описании заявленного способа используются выборка радиосигналов, под которой понимается последовательность упорядоченных во времени значений сигнала подлежащего идентификации, и зарегистрированных средством мониторинга.
Уровень техники
Известен способ идентификации сигналов — патент RU 2485586 С1 (кл. G06K 9/62) [2], техническим результатом которого является снижение временной длительности процедуры идентификации анализируемого сигнала с эталонами и сокращение памяти, необходимой для хранения эталонных образцов сигналов.
Реализация способа RU 2485586 С1 предусматривает предварительный этап, этапы обучения и распознавания. При обучении формируют эталонные классы сигналов, отличающиеся значениями характеризующих классы идентификаторов, и осуществляют запись идентификаторов эталонных классов для последующей идентификации текущих анализируемых сигналов. При распознавании сигнала преобразуют анализируемый сигнал к определенному виду, выбранному на предварительном этапе, принимают решение о принадлежности сигнала к эталонному классу путем оценки количества параметров преобразованного анализируемого сигнала совпавших с эталонными параметрами сигнала, названных в описании способа идентификаторами, и количества не совпавших параметров- идентификаторов.
Этот способ является наиболее близким по технической сущности и выбран в качестве способа- прототипа заявленного изобретения.
Существенным недостатком способа-прототипа, не позволяющим его использовать в ряде случаев для решения задачи обнаружения источника радиоизлучения путем идентификации радиосигналов, является невозможность распознавания источника излучения в случае, если анализируемые сигналы соответствуют установленным требованиям, при этом требования содержать один набор номинальных (эталонных) параметров сигналов. Т.е. в случае, если анализируемые сигналы относятся к одному эталонному классу сигналов. Кроме того, существенными недостатками способа-прототипа являются:
— необходимость проведения трудоемкого этапа обучения, предусматривающего формирование эталонных классов сигналов;
— необходимость предварительного обоснования количественных значений идентификаторов сигнала, отличающих эталонные классы сигналов друг от друга;
— сложность обоснования значений идентификаторов эталонных классов при большом количестве допустимых или возможных близких диапазонах значений идентификаторов анализируемого сигнала.
Трудоемкость этапа обучения и способа в целом прямо пропорциональна количеству применяемых идентификаторов, позволяющих отличать классы сигналов, и количеству диапазонов возможных значений идентификаторов. В связи с отмеченными недостатками, внедрение способа RU 2485586 С1 для идентификации сигнала и объекта автоматической системы идентификации судов для случая невозможности декодирования сигнала является неразрешимой технической задачей, так как,
во-первых, количество судов, оснащенных судовой аппаратурой АИС достаточно велико [1, с. 11-13] и записать уникальные для каждого судна параметры сигнала затруднительно;
во-вторых, требования к параметрам излучаемых сигналов едины для аппаратуры всех судов, строго определены действующими международными стандартами [1, с. 14-15], и априори выявить в сигнале параметры-идентификаторы, позволившие бы отличить сигнал одного судна от сигнала другого невозможно.
Раскрытие изобретения
Задача, на решение которой направлено заявленное изобретение, состоит в создании способа обнаружения источника радиоизлучения путем идентификации излучаемого радиосигнала, применение которого при мониторинге радиосигналов позволяет установить: относится ли анализируемый сигнал к радиоизлучающему средству, сигналы которого уже ранее были зарегистрированы, либо анализируемый сигнал относится к новому радиоизлучающему средству, к новому объекту.
Изобретение может применяться в случае, если параметры всех анализируемых сигналов соответствуют одному набору номинальных значений параметров, установленных требованиями к радиоизлучающей аппаратуре одного типа или одного функционального назначения. Изобретение не требует проведения этапа обучения для формирования эталонных классов сигналов.
Технический результат, достигаемый настоящим изобретением, заключается в обнаружении различных источников излучения радиосигналов, зарегистрированных аппаратурой мониторинга на интервале мониторинга, отличающихся друг от друга значениями свойственных им параметров излучаемого сигнала. Результат достигается за счет того, в качестве свойственных каждому сигналу параметров применяются характеристики сигнала, рассчитанные методами математической статистики по выборкам значений анализируемого сигнала, а отличающиеся между собой сигналы и источники радиоизлучения обнаруживают путем сравнительного анализа статистических характеристик различных сигналов, принятых на интервале мониторинга.
В заявленном способе статистические характеристики сигналов названы в дальнейшем идентификаторами, также, как и в способе-прототипе.
Заявленное изобретение основано на учете физических свойств стандартов частоты радиоизлучающей аппаратуры от которых непосредственно зависят частота излучаемых сигналов и интервалы следования излучаемых дискретных сообщений. Значение стандарта частоты должно соответствовать номинальной величине, установленной требованиями к радиоаппаратуре. Помимо номинальной величины значение стандарта частоты имеет случайную составляющую, величина которой определена особенностями элементов и конструкции каждого стандарта частоты. Очевидно, действительное значение частоты излучаемых сигналов или интервала следования сообщений при функционировании радиоизлучающей аппаратуры является случайной величиной и зависит от случайной составляющей стандарта частоты.
Случайное значение интервала следования сообщений (или частоты сигналов) подчиняется определенному закону распределения, который может быть описан численными параметрами, иначе говоря, статистическими характеристиками анализируемого радиосигнала — идентификаторами. В заявленном изобретении расчет идентификаторов, характеризующих закон распределения, осуществляют методами математической статистики путем обработки выборок значений сигнала, зарегистрированных на интервале наблюдения. В предложенном способе именно численные параметры закона распределения частоты излучаемых сигналов или интервала следования сообщений используют для идентификации источника излучения. В состав таких численных параметров предложено включать: математическое ожидание; дисперсию; нормированные центральные моменты и нормированные кумулянты различного порядка; коэффициент вариации; коэффициент эксцесса.
Сущность изобретения состоит в том, что так же как в способе-прототипе для идентификации анализируемого радиосигнала по его значениям, зарегистрированным аппаратурой мониторинга, рассчитывают характеризующие радиосигнал величины — идентификаторы, решение о непринадлежности сигнала к наблюдавшимся ранее сигналам принимают путем оценки количества несовпадающих идентификаторов анализируемого сигнала с идентификаторами наблюдавшихся ранее сигналов, согласно изобретения, в качестве идентификаторов применяют статистические характеристики закона распределения интервала между излучениями сигнала или(и) частоты излучения сигнала, включающие математическое ожидание, дисперсию, нормированные центральные моменты и нормированные кумулянты различного порядка, коэффициент вариации, коэффициент эксцесса, при условии превышения количества несовпавших идентификаторов установленного порогового значения, принимают решение об отличии анализируемого сигнала от ранее наблюдавшихся сигналов и обнаружении нового источника радиосигнала, включают вновь идентифицированный сигнал в перечень наблюдавшихся радиосигналов.
Существенные признаки, характеризующие изобретение, и обеспечивающие получение технического результата.
1. Применение в качестве идентификаторов анализируемого сигнала статистических характеристик закона распределения интервала между излучениями сигнала или (и) частоты излучения сигнала.
2. Выполнение следующей совокупности последовательных действий:
— регистрация значений анализируемого сигнала на интервале наблюдения; длительность интервала наблюдения выбирают исходя из необходимости получения выборки случайных значений анализируемого сигнала достаточной размерности для применения методов математической статистики;
— формирование выборки случайных значений анализируемого параметра наблюдаемого радиосигнала, используемой в дальнейшем для вычисления статистических характеристик закона распределения анализируемой случайной величины -идентификаторов анализируемого радиосигнала;
— вычисление математическими методами статистических характеристик закона распределения интервала между излучениями сигнала или(и) частоты излучения сигнала -идентификаторов радиосигнала, в том числе: математического ожидания, дисперсии, нормированных центральных моментов и нормированных кумулянтов различного порядка, коэффициента вариации, коэффициента эксцесса;
— определение количества идентификаторов анализируемого сигнала, несовпадающих с идентификаторами наблюдавшихся ранее сигналов, путем сопоставления идентификаторов нового радиосигнала с идентификаторами перечня сигналов, наблюдавшихся ранее на интервале мониторинга и сохраненных в аппаратуре мониторинга; несовпадением может служить, например, разность идентификаторов анализируемого сигнала и наблюдавшихся ранее сигналов, превышающая установленную величину;
— принятие решения об отличии анализируемого сигнала от ранее наблюдавшихся сигналов и обнаружении нового источника радиосигнала, при условии, если количество не совпавших идентификаторов анализируемого сигнала с идентификаторами перечня ранее наблюдавшихся сигналов, превышает установленное пороговое значение;
— дополнение перечня и значений идентификаторов наблюдавшихся ранее сигналов значениями идентификаторов нового обнаруженного сигнала.
Выборочные центральные моменты as случайной величины вычисляют по формуле

где s — порядок центрального момента;
xt — случайное значение параметра анализируемого радиосигнала;
а 0 — оценка математического ожидания.Для расчета нормированных выборочных центральных моментов случайной величины bs следует использовать метрику Г. Минковского [3 с. 700, 4], согласно которой, моменты вычисляют по формуле

где k — показатель Минковского, порядок момента.
Вычисление коэффициента асимметрии, коэффициента эксцесса, кумулянтов, проводят по формулам, приведенным, например, в работе [5, с. 207, 208, 210].
Так для расчета коэффициентов вариации, эксцесса используют формулы
коэффициент вариации —
коэффициент эксцесса —
где σ — среднеквадратическое отклонение.
Для вычисления кумулянтов первого, …, шестого порядков применяют по формулы
w1=а 0, w2=а 2, w3=а 3,
w5=а 5 — 10а 2 а 3,
При первом применении способа в качестве перечня и значений идентификаторов наблюдавшихся ранее сигналов могут быть использованы нулевые значения.
Описание блок-схемы устройства
Блок-схема устройства для осуществления предлагаемого способа представлена на фиг. Устройство для обнаружения источника радиоизлучения по статистическим характеристикам радиосигнала содержит блок приема радиосигнала 1, бортовую цифровую вычислительную машину (БЦВМ) 2, устройство хранение перечня значений идентификаторов наблюдавшихся сигналов 3.
Причем первый вход БЦВМ 2 соединен с выходом блока приема радиосигнала 1, второй вход БЦВМ 2 соединен с выходом устройства хранения перечня значений 3.
Осуществление изобретения
Устройство работает следующим образом. Блок 1 принимает радиосигнал, регистрирует значения наблюдаемого сигнала и передает значения на первый вход БЦВМ 2, в которой формируют выборку случайных значений параметра радиосигнала, вычисляют статистические характеристики закона распределения случайной величины параметра анализируемого сигнала, определяют количество идентификаторов анализируемого сигнала не совпадавших с идентификаторами наблюдавшихся ранее сигналов. При этом на второй вход БЦВМ 2 поступают значения идентификаторов наблюдавшихся ранее сигналов из устройства 3. БЦВМ 2 определяет количество идентификаторов анализируемого сигнала не совпадающих с идентификаторами ранее наблюдавшихся сигналов, формирует сообщение об обнаружении нового источника радиосигнала, и передает значения идентификаторов нового сигнала в устройство хранения значений 3.
Промышленная применимость
Основной технический результат, достигаемый заявленным изобретением, заключается в возможности обнаружения различных источников излучения радиосигналов, отличающихся друг от друга значениями свойственных источнику статистических характеристик излучаемого радиосигнала. Применение способа при мониторинге радиосигналов позволяет установить: относится ли анализируемый сигнал к радиоизлучающему средству, сигналы которого уже ранее были зарегистрированы, либо анализируемый сигнал соответствуют новому радиоизлучающему средству и новому объекту.
Проведена оценка применимости заявленного способа путем обработки выборок радиосигналов, зарегистрированных при натурных наблюдениях, при обработке 5 выборок радиосообщений, переданных аппаратурой автоматической идентификации судов. При натурных испытаниях обработаны радиосообщения 5 различных судов, находящихся в Баренцевом море. При этом было достоверно известно, что каждая из 5 зарегистрированных выборок относится к одному из 5 различных судов. Размерности 1, 2, 3, 4, 5 выборок составили 94, 113, 131, 175, 88 значений случайных интервалов между сообщениями. Перечни 26 статистических характеристики, рассчитанные для каждой выборки случайных интервалов, составили следующие идентификаторы: