Основные понятия теории графов
Графом $G$ называется пара множеств $G = (V, E$, где $V(G)$ — непустое конечное множество элементов, называемых вершинами графа, а $E$ — множество пар элементов из $V$ (необязательно различных), называемых ребрами графа. $E = \<(u , v)\ | u, v \in V\>$ — множество ребер графа $G$, состоящее из пар вершин $(u, v)$. Ребро $(u, v)$ соединяет вершины $u$ и $v$.
Граф — это набор вершин (точек) и соединяющих их отрезков (рёбер).
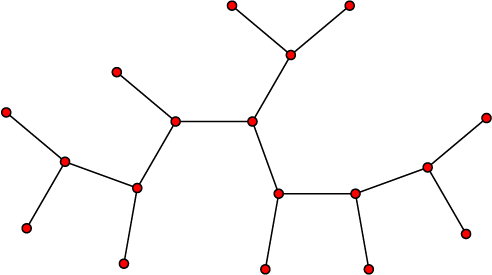
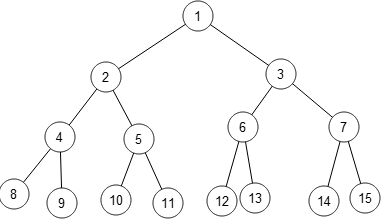
Две вершины, соединенные ребром, называют смежными вершинами. Обычно в задачах $N$ — количество вершин, а $M$ — ребер. Количество ребер, исходящее из вершины называют степенью вершины $d(v)$. Для вершины $a$ ребро $(a, b)$ называется инцидентным ей. На рисунке ниже вершине 8 инцидентно только ребро (4, 8), а вершине 10 ребра (2, 10) и (5, 10).
Если какие-то две вершины соединены более, чем одним ребром, то говорят, что граф содержит кратные ребра. Если ребро соединяет вершину саму с собой, то такое ребро называют петлей.
Простой граф не содержит петель и кратных ребер. Если не сказано ничего про наличие петель и кратных ребер, мы будем всегда считать, что граф простой.
Также часто рассматривают ориентированные графы — это графы, у которых ребра имеют направление, а иначе граф – неориентированный.
Дерево — это связный неориентированный граф без циклов.
1) У дерева с хотя бы 2 вершинами всегда есть висячая вершина — вершина степени 1.
Действительно, если начать из любой вершины идти по непосещенным ранее вершинам, то в какой-то момент мы прекратим это делать, ведь граф конечный. При этом если из этой вершины не может быть ребер в непосещенные вершины — ведь тогда прекращать рано, и не может быть ребер в посещенные ребра (помимо предыдущей) — ведь тогда есть цикл. А значит, есть ребро только в предыдущую вершину, значит степень равна 1.
2) У дерева с хотя бы 2 вершинами всегда есть две висячие вершины.
Действительно, если предыдущий алгоритм начать из висячей вершины, то мы уткнемся в другую висячую вершину.
3) У дерева с $N$ вершинами всегда ровно $N-1$ ребро.
Давайте отрезать от дерева его висячие вершины — при этом число вершин уменьшится на один, число ребер тоже уменьшится на один, а граф останется деревом. Раз граф остается деревом, у него все время будет висячая вершина, пока $N > 1$. В какой-то момент останется только одна вершина и ноль ребер. Раз мы отрезали столько же вершин, сколько ребер, и получили 1 вершину и 0 ребер, значит изначально вершин было ровно на одну больше.
4) Между любыми двумя вершинами в дереве есть ровно один простой путь.
Действительно, если их два, то в графе есть цикл. Быть ноль их не может — ведь граф связный.
5) Дерево — это минимальный по числу рёбер связный граф на $N$ вершинах.
Действительно, если есть связный граф, в котором меньше, чем $N-1$ ребро, то давайте уберем из его цикла ребро. Граф при этом остается связным, а число ребер уменьшается. Давайте повторять это, пока в какой-то момент циклов в графе не будет, а значит осталось дерево. Но мы уже доказали, что в дереве $N-1$ ребро, это противоречие, ведь у нас сначала было меньше ребер, а мы еще и удалили сколько-то.
Автор конспекта: Глеб Лобанов
По всем вопросам пишите в telegram @glebodin
Лекция «Сети и теория графов»
Учебные цели: формирование представления о графе и его основных характеристиках.
Тип: Лекция
Автор: Екатерина Калинина
Трудомкость: 2 ч.
Тема: Основы сетевого анализа
Основу теории графов заложила так называемая «Задача о кёнигсбергских мостах», на сегодняшний день ставшая классической. Суть задачи состоит в следующем:
Бывший Кенигсберг (ныне Калининград) расположен на реке Преголя. В пределах города река омывает два острова. С берегов на острова были перекинуты мосты. Старые мосты не сохранились, но осталась карта города, где они изображены. Кенигсбергцы предлагали приезжим следующую задачу: пройти по всем мостам и вернуться в начальный пункт, причём на каждом мосту следовало побывать только один раз.
Издавна гостей Кёнигсберга интересовал вопрос: можно ли пройти по всем мостам через реку Преголя, не проходя ни по одному из них дважды? В 1736 году выдающийся математик Леонард Эйлер заинтересовался этой задачей, после чего привел строгое доказательство того, что сделать это невозможно. Результаты исследования Эйлера заложили основу теории графов и отлично иллюстрируют направление её развития в настоящее время.
Граф в теории графов – это, в общем случае, математический объект (или геометрическая схема), который представляет собой совокупность вершин, соединенных рёбрами.
Вершины, в зависимости от контекста задачи, могут изображать точки назначения (города, острова, местоположения людей и т.п.), узлы связи (в компьютерных сетях), конкретных людей или адресатов и т.д. Значения рёбер также зависит от условий задачи – они могут обозначать как пути между вершинами, так и связи разного рода (социальные, экономические, физические и т.п.). Поэтому сейчас все чаще выделяют особые виды графов в рамках конкретных областей применения: социальные, молекулярные, веб‑графы и др.
Основные понятия теории графов:
- Говорят, что ребро инцидентно вершине, если эта вершина является концом данного ребра.
- Два ребра называются смежными, если они имеют общую концевую вершину. Две вершины, инцидентные одному ребру, также называют смежными.
- Два ребра называются кратными, если множества их концевых вершин совпадают.
- Ребро называется петлёй, если его концы совпадают.
- Степень вершины – это количество рёбер, концом которых она является. Если вершине не инцидентно ни одно ребро, такую вершину называют изолированной.
- Путь в графе – это любая последовательность вершин, в которой каждые две соседние вершины соединены ребром.
- Цикл в графе – это путь, у которого начальная и конечная вершина совпадают.
Основные виды графов:
- Ориентированный граф – граф, в котором каждое ребро имеет направление, обозначаемое стрелкой.
- Неориентированный граф – граф, в котором рёбра не имеют направлений.
- Смешанный граф – граф, в котором присутствуют как ориентированные, так и не ориентированные рёбра.
- Мультиграф – граф, содержащий кратные рёбра.
- Псевдограф – граф, содержащий кратные рёбра и петли.
- Простой граф – граф, в котором не содержатся кратные рёбра и петли.
- Полный граф – простой неориентированный граф, в котором две любые вершины смежны.
- Плоский граф – граф, который может быть изображён на плоскости без пересечения рёбер.
- Дерево – это граф, не содержащий циклов.
Синонимичным к понятию «граф» является понятие «сеть». Однако сетями чаще всего называют такие графы, вершины которых определенным образом помечены, т.е. несут смысловую нагрузку. Таким образом, графом чаще называют строгий математический объект, к которому применимы все законы теории графов, о сетях чаще говорят в контексте прикладных (социологических, биологических, химических и т.д.) исследований.
Базовые понятия сетей:
- узлы (в графах: вершины);
- связи (в графах: рёбра).
Теория сетей и сетевой анализ находят свое применение в различных областях науки, техники, а также повседневной деятельности людей:
- транспортные системы и сети перевозок;
- инженерные сети;
- биологические сети;
- нейросети (и искусственный интеллект);
- социальные сети;
- нарративные (повествовательные) сети;
- компьютерные сети и др.
Литература
Тематические проекты, онлайн-курсы и программное обеспечение
Библиографическая ссылка: Калинина Е. Сети и теория графов // Изучаем Digital Humanities [Электронный ресурс]. 2018. URL: https://dhumanities.ru/?p=1850
контакты
Динара Амировна Гагарина, сооснователь DH CLOUD Community
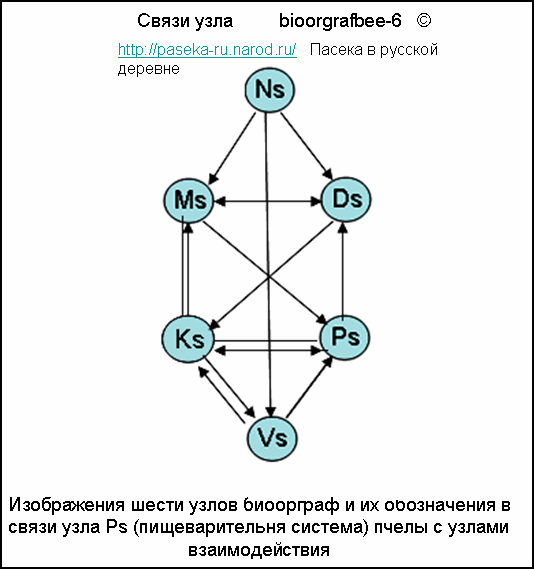
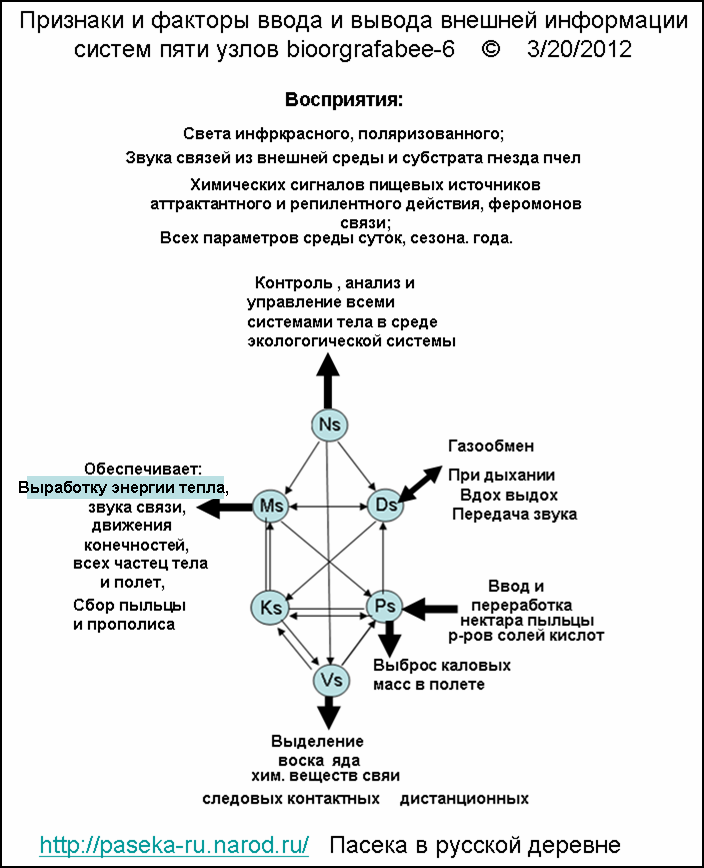
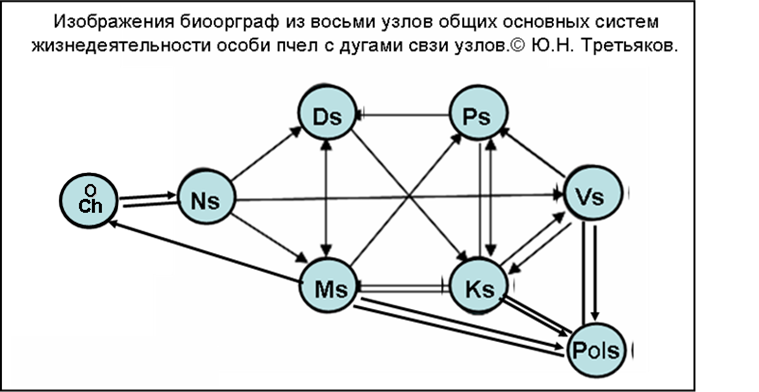
Биологические ориентированные графы (биоорграф) медоносной лчелы.
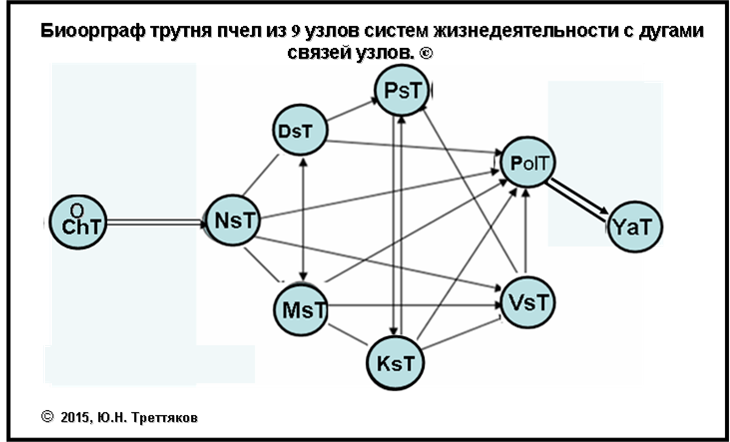

img src=»http://paseka-ru.narod.ru/pic/bioorgrafbee-8.png»width=»507″ height=»619″ border=»0″ alt=» Биограф пчел-8″>
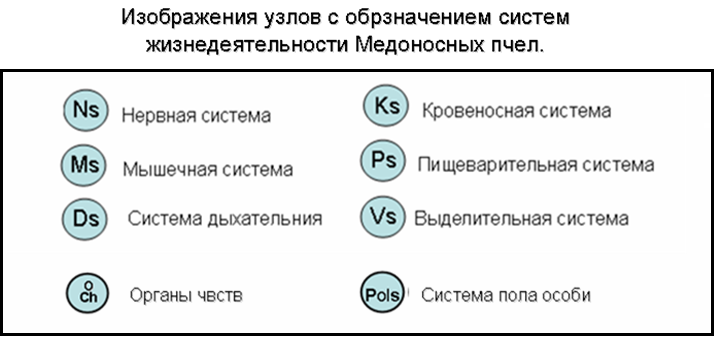
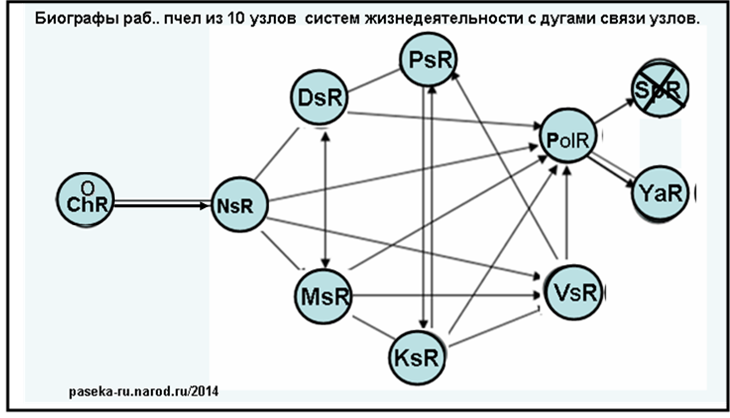
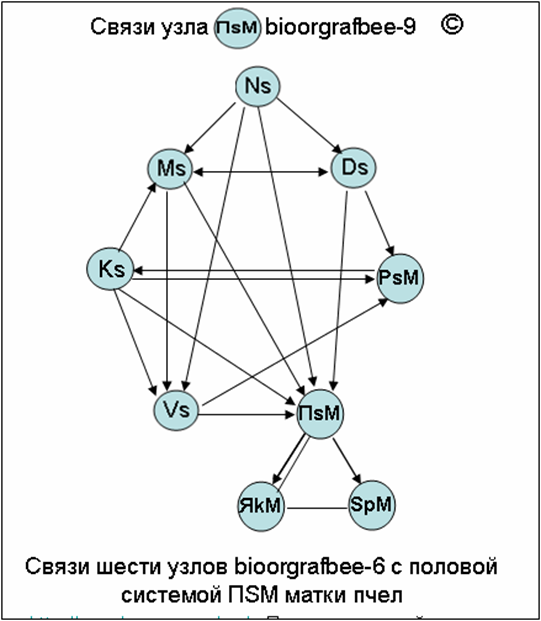
Развязка узлов систем рабочей пчелы
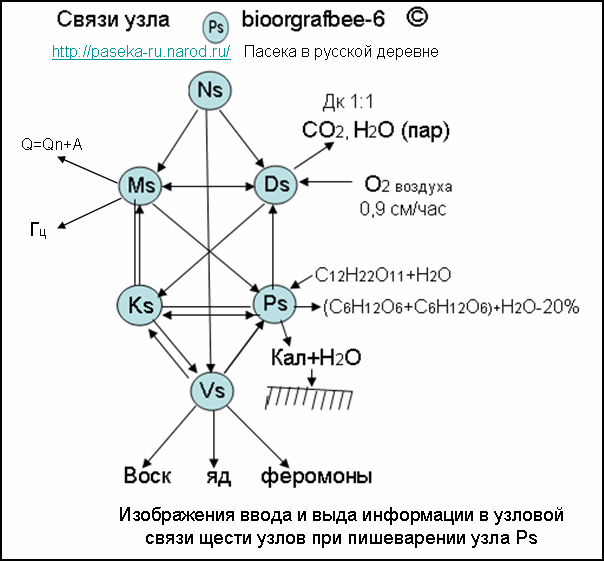
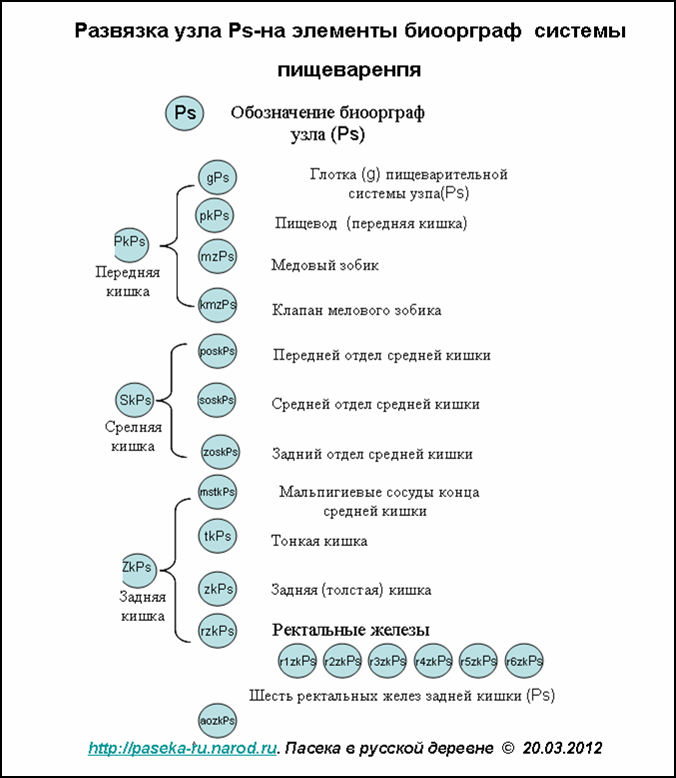
Биологические ориентированные графы (биоорграф) в развязке общего узла графа (Ps) пищеварительной системы медоносной лчелы
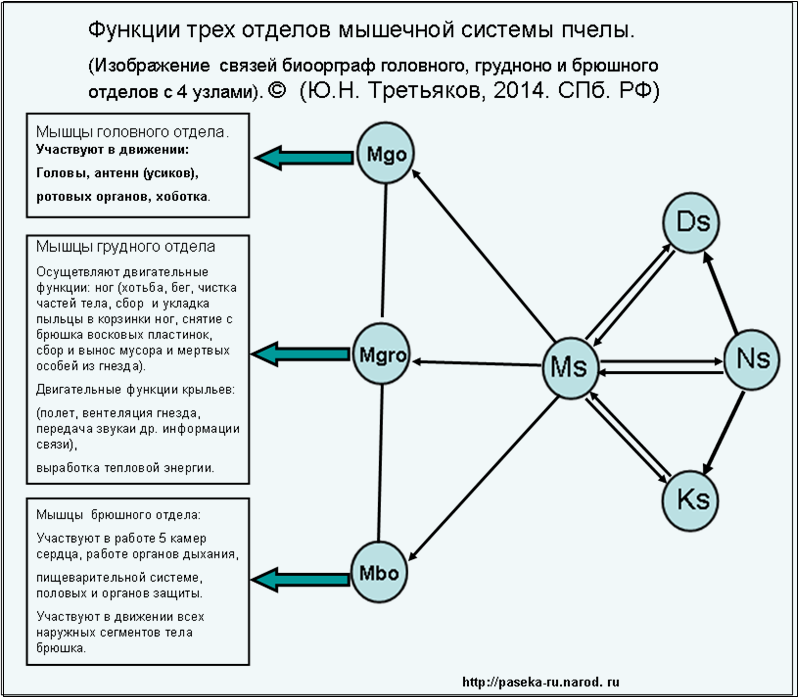
Развязка узла мышечной системы биоорграф по трем отделам тела пчел.©
Статья №1. 14.02.2011
1. Графы . Графы, Орграфы, Графы связи связи и биоорграфы в моделировании с модулями и моделями особей пчел
1.1. Теория графов
Краткое представление о теории графоф из Википедии
Материал из Википедии — свободной энциклопедии. /Интернет/
Тео́рия гра́фов — раздел дискретной математике, изучающий свойства графов. В общем смысле граф представляется как множество вершин (узлов), соединённых рёбрами. В строгом определении графом называется такая пара множеств G=(V,E), где V есть подмножество любого счётного множества, а E — подмножество V×V.
Изображение Графов с шестью вершинами (узлами) и семью рёбрами
(Все изображения смотреть в материалах из Википедии — свободной энциклопедии). /Интернет/
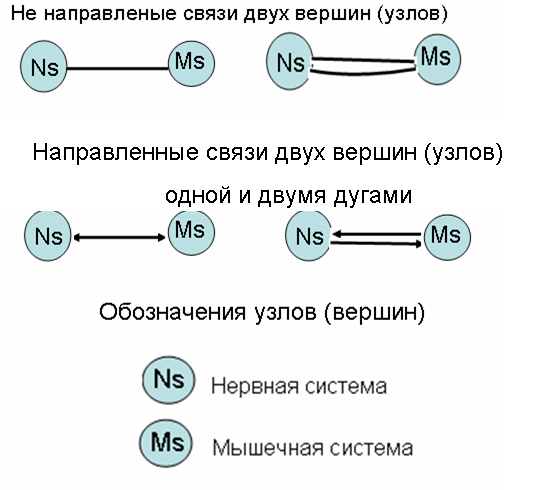
При изображении графов чаще всего используется следующая система обозначений: каждой вершине сопоставляется точка на плоскости, и если между вершинами существует ребро, то соответствующие точки соединяются отрезком. В случае ориентированного графа отрезки заменяют стрелками.
Не следует путать изображение графа с собственно графом (абстрактной структурой), поскольку одному графу можно сопоставить не одно графическое представление. Изображение призвано лишь показать, какие пары вершин соединены рёбрами, а какие — нет. Часто на практике бывает трудно ответить на вопрос, являются ли два изображения моделями одного и того же графа или нет. В зависимости от задачи, одни изображения могут давать более наглядную картину, чем другие.
Родоначальником теории графов считается Леонард Эйлер. В 1736 году в одном из своих писем он формулирует и предлагает решение задачи о семи кёнигсбергских мостах, ставшей впоследствии одной из классических задач теории. Семь мостов Кёнигсберга — один из первых результатов в теории графов, опубликован Эйлером в 1736.
Теория графов содержит большое количество нерешённых проблем и пока не доказанных гипотез. К теории графов также относится целый ряд математических проблем, не решенных на сегодняшний день.
1.1.1. Применение теории графов
В схемотехнике (топология) межсоединений элементов на печатной плате или микросхеме представляет собой граф или гиперграф) [2].
В химии (для описания структур, путей сложных реакций[1], правило фаз также может быть интерпретировано как задача теории графов); компьютерная химия — сравнительно молодая область химии, основанная на применении теории графов. Теория графов представляет собой математическую основу хемоинформатики. Теория графов позволяет точно определить число теоретически возможных изомеров у углеводородов и других органических соединений.
Также в других облостях можно смотреть материал из Википедии — свободной энциклопедии
Также других облостях можно смотреть материал из Википедии — свободной энциклопедии
1.2. Ориентированный граф
Материал из Википедии — свободной энциклопедии
1.2.1. Краткое представление орграф
Ориентированный граф (кратко орграф) — (мульти) граф, рёбрам которого присвоено направление. Направленные рёбра именуются также дугами, а в некоторых источниках (Оре) и просто рёбрами.Формально, орграф D =( V , E ) есть множество E упорядоченных пар вершин .Дуга < u , v >инцидентна вершинам u и v . При этом говорят, что u — начальная вершина дуги, а v — конечная вершина.
Изображение орграфов с тремя узлами
(Все изображения смотреть в материалах из Википедии — свободной энциклопедии). /Интернет/
Орграф, полученный из простого графа ориентацией ребер называется направленным. В отличие от последнего, в произвольном простом орграфе две вершины могут соединяться двумя разнонаправленными дугами.
Ориентированный граф, полученный из заданного сменой направления ребер на противоположное, называется обратным.
Направленный полный граф называется турниром
Маршрутом в орграфе называют чередующуюся последовательность вершин и дуг, вида v 0 < v 0, v 1>v 1 < v 1, v 2>v 2. vn (вершины могут повторяться). Длина маршрута — количество дуг в нем.
Путь есть маршрут в орграфе без повторяющихся дуг, простой путь — без повторяющихся вершин. Если существует путь из одной вершины в другую, то вторая вершина достижима из первой.
Контур есть замкнутый путь.
Направленный ациклический граф или гамак есть бесконтурный орграф.
Орграф сильно связный, или просто сильный. если все его вершины взаимно достижимы; односторонне связный, или просто односторонний если для любых двух вершин, по крайней мере одна достижима из другой; слабо связный, или просто слабый, если при игнорировании направления дуг получается связный (мульти)граф;
Простым орграфом представимы антирефлексивные отношения, в общем случае требуется орграф с петлями. Если отношение симметрично, то его можно представить неориентированным графом, а если антисимметрично, то направленным
1.2.2. Применение орграфов
Орграфы широко применяются в программировании как способ описания систем со сложными связями. К примеру, одна из основных структур, используемых при разработке компиляторов и вообще для представления компьютерных программ — граф потоков данных.
o В комбинаторике перестано́вка — это упорядоченный набор чисел обычно трактуемый как биекция на множестве , которая числу i ставит соответствие i -й элемент из набора. Число n при этом называется порядком перестановки.
В теории групп под перестановкой (подстановкой) произвольного множества подразумевается биекция этого множества на себя.\
Примечание. Более подробно о Теории Графов и Орграф в доступных материалах Википедии — свободной энциклопедии. /Интернет/
Понятие и представление графа: матрица смежности, список смежности
Графы — фундаментальное понятие как в математике, так и в информатике. Проще всего объяснить его с помощью аналогии с дорожной системой. Существует определённый набор городов, некоторые из которых связаны дорогами, которые могут быть как односторонними, так и двухсторонними. Вся эта структура и называется графом.
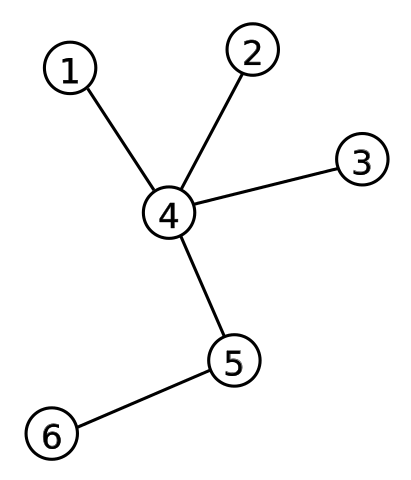
Ну а более формально, граф — комбинация набора вершин и набора рёбер. Вершины — это города, а рёбра — дороги. Визуально граф можно представить так:
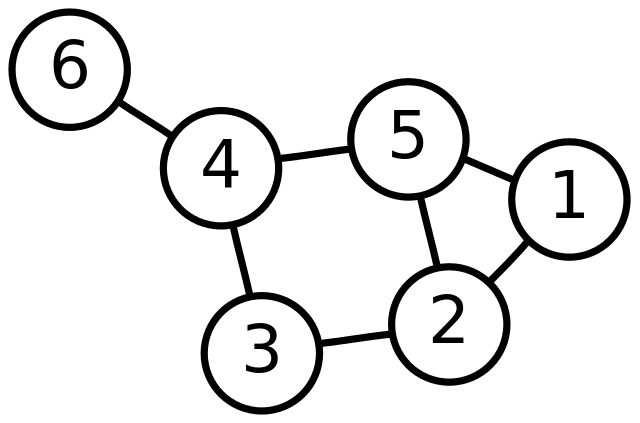
Этот граф состоит из 6 вершин, пронумерованных начиная с единицы, и 7 двухсторонних рёбер. Рёбра обычно записывают в виде пар вершин, которые они соединяют: \(1\)-\(2\), \(1\)-\(5\), \(2\)-\(3\), \(2\)-\(5\), \(3\)-\(4\), \(4\)-\(5\), \(4\)-\(6\).
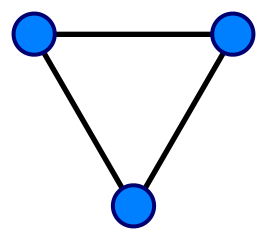
Ориентированные и неориентированные графы
Мы уже упоминали, что “дороги” в графе могут быть как односторонними, так и двухсторонними. Для этого свойства существует отдельный термин: односторонние “дороги” называются ориентированными рёбрами (или дугами), а двухсторонние — неориентированными.
Граф, в котором все рёбра неориентированные, также называют неориентированным, а граф с ориентированными рёбрами, соответственно, ориентированным.
 |
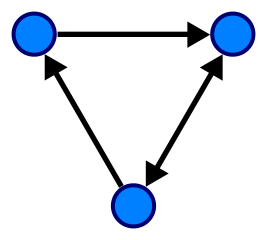 |
Слева изображён неориентированный граф, а справа — ориентированный. Как несложно догадаться, левый граф можно обходить как по часовой стрелке, так и против, а правый можно полностью обойти только по часовой, хотя одно из ребёр в нём также неориентированное (считается, что это два противоположных ориентированных ребра).
Пути и циклы
Путём в графе называется последовательность вершин, каждая из которых соединена со следующей ребром. Чаще всего под “путём” подразумевают простой путь, все вершины которого различны. Путь, который проходит через какую-либо вершину более одного раза называют сложным путём.
Если первая вершина пути совпадает с последней, то такой путь называют циклом.
Приведём примеры на этом графе:
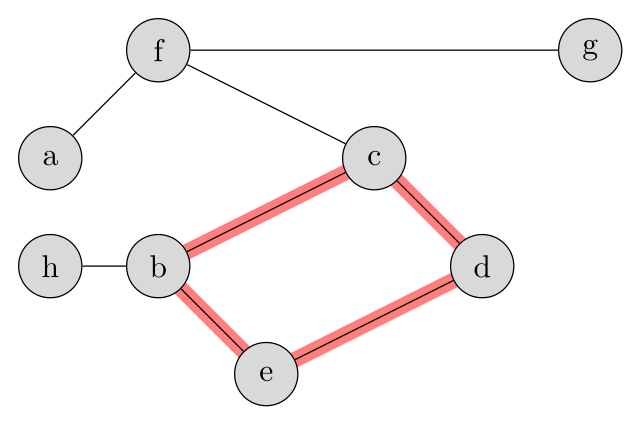
Из множества возможных простых путей самый длинный: \(a — f — c — d — e — b — h\) (существуют и другие пути с такой же длиной).
Циклом является путь \(b — c — d — e — b\) (выделен цветом). Можно начать и с любой другой вершины, например, \(c — d — e — b — c\).
Кратные рёбра и петли
Существует множество разновидностей графов, и среди них встречаются довольно специфические. В частности, так называемые мультиграфы разрешают наличие между двумя вершинами нескольких рёбер (называемых кратными рёбрами), а также наличие петель. Петля — ребро, входящее в ту же вершину, из которой исходит. Выглядят они следующим образом:
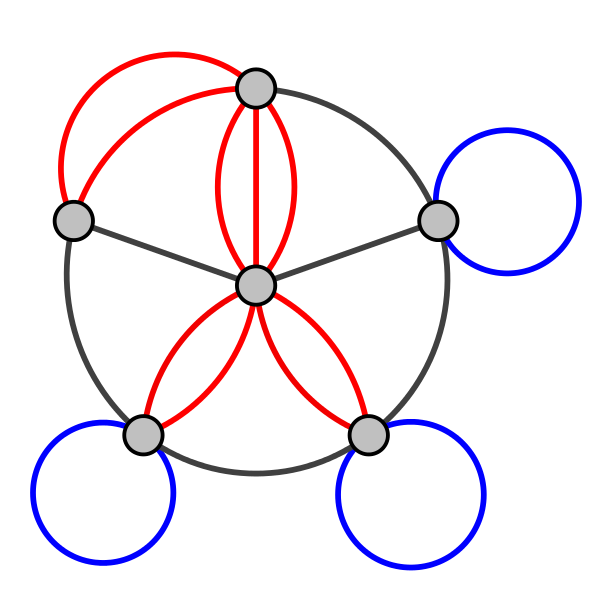
Красным выделены кратные рёбра, а синим — петли.
Мультиграфы встречаются в задачах реже чем обычные графы (называемые простыми), но всё же встречаются, поэтому стоит иметь о них элементарное представление.
Связные графы
Граф называется связным если между любой парой вершин существует хотя бы один путь. Как пример рассмотрим следующий граф:
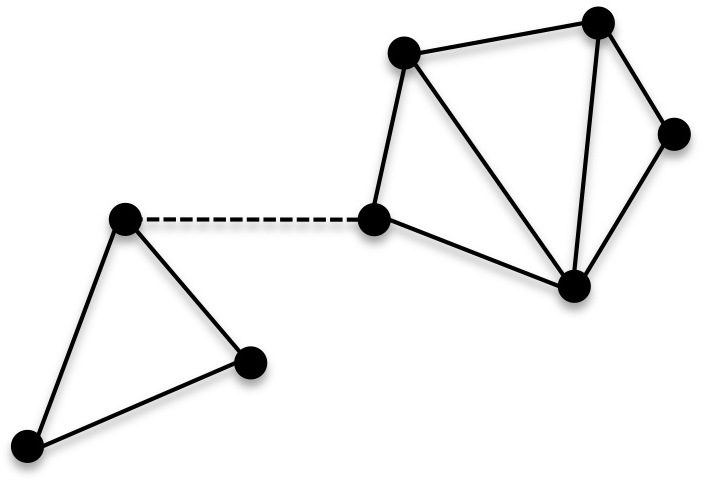
Одно из рёбер проведено штрихами. Если это ребро присутствует, то граф является связным. Если же его убрать, то связность теряется, граф разбивается на две части, друг с другом не связанные. Такие части называются компонентами связности.
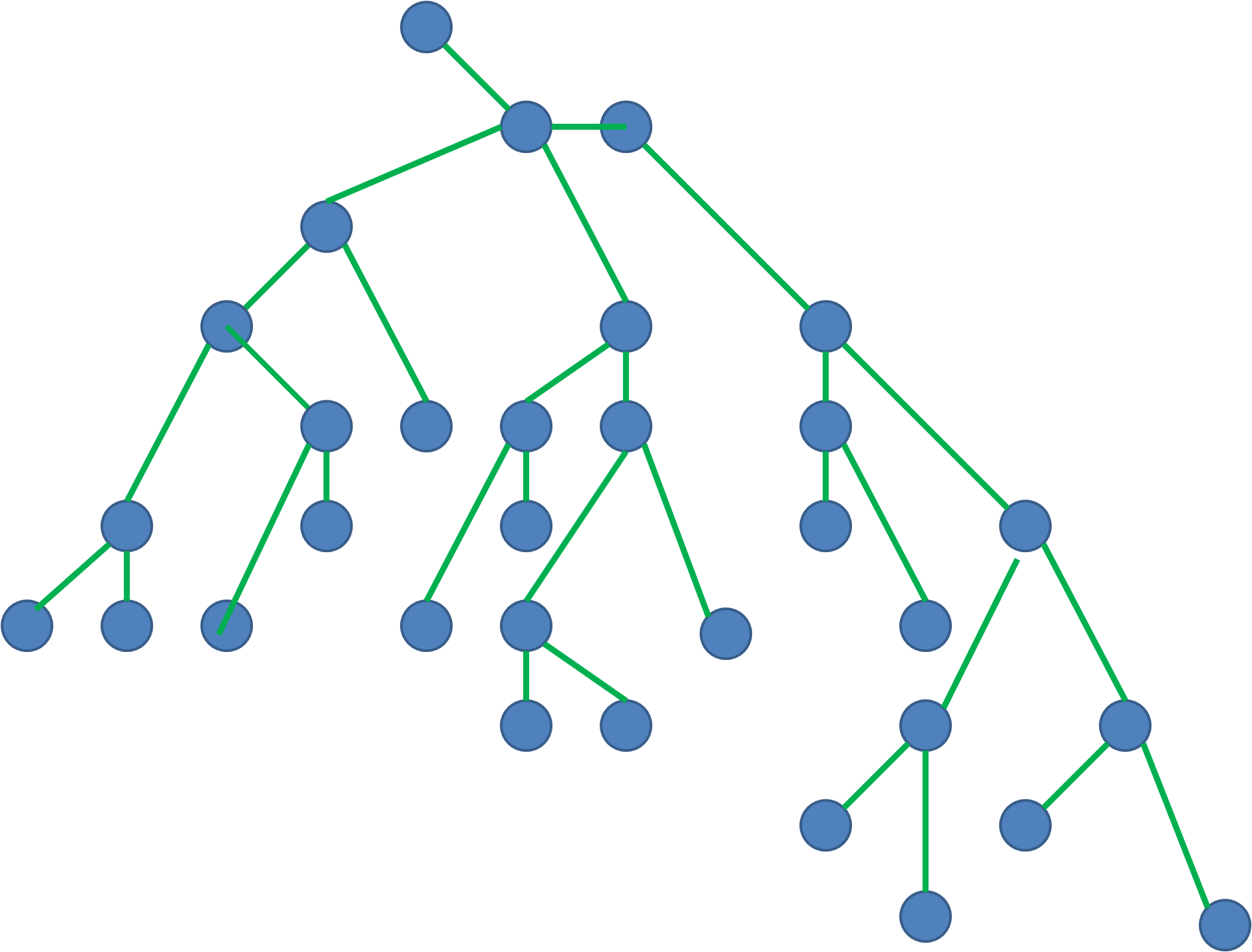
Определение дерева
Дерево — вид графа, который можно назвать самым простым, но они обладают множеством особых свойств и встречаются в задачах чуть ли не чаще остальных графов.
Дерево — это связный граф без циклов, петель и кратных рёбер.
Все изображённые графы являются деревьями:
Среди множества свойств деревьев можно выделить два самых известных:
- Количество рёбер связано с количеством вершин формулой \(E = V — 1\).
- Между любой парой вершин существует ровно один путь.
Матрица смежности
Существует два основных способа представления графов в программировании. Один из них, матрица смежности, используется гораздо реже, но очень просто реализуется. Граф из \(N\) вершин задаётся матрицей (двумерным массивом) \(N * N\), в которой \(g[i][j]\) — логическое значение, true или false , обозначающее, существует ли ребро из вершины \(i\) в вершину \(j\).
В качестве примера решим простую задачу: для каждой вершины графа выведем количество рёбер, смежных с ней.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38using namespace std; bool graph[1000][1000]; int main() int n, m; //количество вершин и рёбер соответственно cin >> n >> m; for (int i = 0; i m; i++) int u, v; //номера вершин, соединённых очередным ребром cin >> u >> v; u--, v--; //Здесь стоит остановиться и вдуматься. //Чаще всего в задачах вершины будут нумероваться с 1 до N, //в отличие от индексации массивов в C++. //У этой проблемы есть два решения. //Первое: работать с номерами "как есть": создавать массивы размером N + 1, //использовать циклы от 1 до N, и т.д. //Второе: уменьшать номера вершин на единицу при вводе, и увеличивать обратно при выводе //Какое из них использовать - ваш личный выбор. //Для меня 1-индексация в С++ выглядит очень чужеродно, поэтому я использую второе решение. graph[u][v] = graph[v][u] = true; //Если бы граф был ориентированным, то обратное ребро мы бы не создавали. > for (int i = 0; i n; i++) int c = 0; for (int j = 0; j n; j++) if (graph[i][j]) c++; > > cout <c <" edges adjacent to vertex " <i + 1 <endl; > >Преимущества матрицы смежности:
- Сложность проверки наличия ребра между двумя вершинами: \(O(1)\)
Недостатки матрицы смежности:
- Занимает \(N^2\) памяти, что неприемлемо для достаточно больших графов.
- Сложность перебора всех вершин, смежных с данной: \(O(N)\)
Список смежности
Гораздо чаще для представления графов используется список смежности. Его идея заключается в хранении для каждой вершины расширяемого массива (вектора), содержащего всех её соседей.
Решим ту же задачу с использованием списка смежности (и С++11 для for-each):
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26using namespace std; vectorint> graph[100000]; //массив из 100000 векторов. int main() int n, m; cin >> n >> m; for (int i = 0; i m; i++) int u, v; cin >> u >> v; u--, v--; graph[u].push_back(v); graph[v].push_back(u); > for (int i = 0; i n; i++) int c = 0; for (int v: graph[i]) //можно было бы просто записать "int c = graph[i].size();", c++; //но такая реализация показывает, как можно перебирать > //соседние вершины. cout <c <" edges adjacent to vertex " <i + 1 <endl; > >Если требуется также удалять рёбра, то вместо вектора нужно использовать std::set .
Преимущества списка смежности:
- Использует \(O(M)\) памяти, что оптимально.
- Позволяет быстро перебирать соседей вершины.
- Позволяет за \(O(\log N)\) проверять наличие ребра и удалять его (при использовании std::set ).
Недостатки списка смежности:
- При работе с насыщенными графами (количество рёбер близко к \(N^2\)) скорости \(O(\log N)\) может не хватать (единственный повод использовать матрицу смежности).
- Для взвешенных графов приходится хранить vector> , что усложняет код.
brestprog
Олимпиадное программирование в Бресте и Беларуси